
13.1E: Mazoezi ya Sehemu ya 13.1
- Page ID
- 178317
Utangulizi wa Kazi za Vector-Thamani
1) Kutoa kazi za sehemu\(x=f(t)\) na\(y=g(t)\) kwa kazi yenye thamani ya vector\(\vecs r(t)=3 \sec t \, \hat{\mathbf{i}}+2 \tan t \,\hat{\mathbf{j}}\).
- Jibu
- Hapa tunaweza kusema kwamba\(f(t)=3 \sec t, \quad g(t)=2 \tan t\)
hivyo tuna\(x(t)=3 \sec t, \quad y(t)=2 \tan t\).
2) Kutokana\(\vecs r(t)=3 \sec t \hat{\mathbf{i}}+2 \tan t \hat{\mathbf{j}}\), pata maadili yafuatayo (ikiwa inawezekana).
- \(\vecs r(\frac{\pi}{4})\)
- \(\vecs r(\pi)\)
- \(\vecs r(\frac{\pi}{2})\)
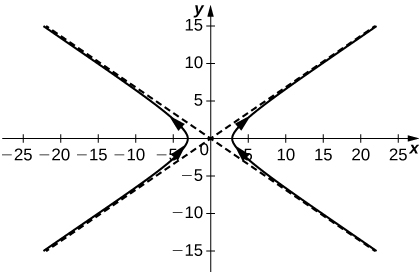
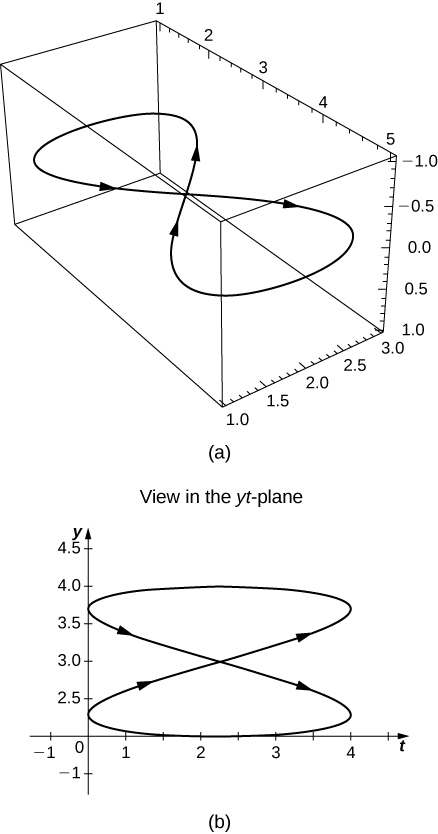
3) Piga mchoro wa kazi yenye thamani ya vector\( \vecs r(t)=3 \sec t \hat{\mathbf{i}}+2 \tan t \hat{\mathbf{j}}\) na kutoa mwelekeo wa curve. Mchoro wa asymptotes kama mwongozo wa grafu.
- Jibu
Mipaka ya Kazi za Vector-Thamani
4) Tathmini\(\lim \limits_{t \to 0}\left(e^t \hat{\mathbf{i}}+\frac{\sin t}{t} \hat{\mathbf{j}}+e^{−t} \hat{\mathbf{k}}\right)\)
5) Kutokana na kazi yenye thamani ya vector\(\vecs r(t)=⟨\cos t,\sin t⟩\) kupata maadili yafuatayo:
- \(\lim \limits_{t \to \frac{\pi}{4}} \vecs r(t)\)
- \(\vecs r(\frac{\pi}{3})\)
- Ni\(\vecs r(t)\) kuendelea katika\(t=\frac{\pi}{3}\)?
- Grafu\(\vecs r(t)\).
- Jibu
-
a.\(⟨\frac{\sqrt{2}}{2},\frac{\sqrt{2}}{2}⟩\),
b.\(⟨\frac{1}{2},\frac{\sqrt{3}}{2}⟩\),
c Ndiyo, kikomo kama t inakaribia\(\mathrm{\frac{\pi}{3}}\) ni sawa na\(\mathrm{r(\frac{\pi}{3})}\),
d.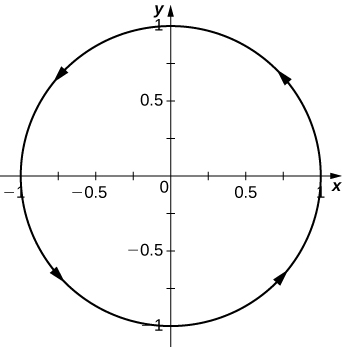
6) Kutokana na kazi yenye thamani ya vector\(\vecs r(t)=⟨t,t^2+1⟩\), pata maadili yafuatayo:
- \(\lim \limits_{t \to -3} \vecs r(t)\)
- \(\vecs r(−3)\)
- Ni\(\vecs r(t)\) kuendelea katika\(x=−3\)?
- \(\vecs r(t+2)−\vecs r(t)\)
7) Hebu\(\vecs r(t)=e^t \hat{\mathbf{i}}+\sin t \hat{\mathbf{j}}+\ln t \hat{\mathbf{k}}\). Pata maadili yafuatayo:
- \(\vecs r(\frac{\pi}{4})\)
- \(\lim \limits_{t \to \frac{\pi}{4} } \vecs r(t)\)
- Ni\(\vecs r(t)\) kuendelea katika\(t=\frac{\pi}{4}\)?
- Jibu
- a.\(e^{\frac{\pi}{4}},\frac{\sqrt{2}}{2},\ln (\frac{\pi}{4})\);
b.;\(e^{\frac{\pi}{4}},\frac{\sqrt{2}}{2},\ln (\frac{\pi}{4})\)
c. Ndiyo
Kwa mazoezi 8 - 13, pata kikomo cha kazi zifuatazo za thamani ya vector kwa thamani iliyoonyeshwa ya\(t\).
8)\(\lim \limits_{t \to 4}⟨\sqrt{t−3},\frac{\sqrt{t}−2}{t−4},\tan(\frac{\pi}{t})⟩\)
9)\(\lim \limits_{t \to \frac{\pi}{2}} \vecs r(t)\) kwa ajili ya\(\vecs r(t)=e^t \hat{\mathbf{i}}+\sin t \hat{\mathbf{j}}+\ln t \hat{\mathbf{k}}\)
- Jibu
- \(⟨e^{\frac{\pi}{2}},1,\ln(\frac{\pi}{2})⟩\)
10)\(\lim \limits_{t \to \infty}⟨e^{−2t},\frac{2t+3}{3t−1},\arctan(2t)⟩\)
11)\(\lim \limits_{t \to e^2}⟨t \ln (t),\frac{\ln t}{t^2},\sqrt{\ln(t^2)⟩}\)
- Jibu
- \(2e^2 \hat{\mathbf{i}}+\frac{2}{e^4}\hat{\mathbf{j}}+2\hat{\mathbf{k}}\)
12)\(\lim \limits_{t \to \frac{\pi}{6}}⟨\cos 2t,\sin 2t,1⟩\)
13)\(\lim \limits_{t \to \infty} \vecs r(t)\) kwa ajili ya\(\vecs r(t)=2e^{−t} \mathbf{ i}+e^{−t} \hat{\mathbf{j}}+\ln(t−1) \hat{\mathbf{k}}\)
- Jibu
- Kikomo haipo kwa sababu kikomo cha\(\ln(t−1)\) kama\(t\) mbinu infinity haipo.
Domain ya Kazi ya Vector-Thamani
Kwa matatizo 14 - 17, tafuta uwanja wa kazi za thamani ya vector.
14) Domain:\(\vecs r(t)=⟨t^2,t,\sin t⟩\)
15) Domain:\(\vecs r(t)=⟨t^2,\tan t,\ln t⟩\)
- Jibu
- \(\text{D}_{\vecs r} = \left \{ t \,|\, t>0,t≠(2k+1)\frac{\pi}{2}, \, \text{where} \, k \,\text{is any integer} \right \}\)
16) Domain:\(\vecs r(t)=⟨t^2,\sqrt{t−3},\frac{3}{2t+1}⟩\)
17) Domain:\(\vecs r(t)=⟨\csc(t),\frac{1}{\sqrt{t−3}}, \ln(t−2)⟩\)
- Jibu
- \(\text{D}_{\vecs r} = \left \{ t \,|\, t>3,t≠n\pi, \, \text{where} \, n \,\text{is any integer} \right \}\)
Kupata uwanja wa\(\vecs r(t)=2e^{-t} \hat{\mathbf{i}}+e^{−t}\hat{\mathbf{j}}+\ln(t−1)\hat{\mathbf{k}}\).
b Kwa nini maadili ya\(t\) ni\(\vecs r(t)=2e^{-t} \hat{\mathbf{i}}+e^{−t}\hat{\mathbf{j}}+\ln(t−1)\hat{\mathbf{k}}\) kuendelea?
- Jibu
- a.\(\text{D}_{\vecs r}: ( 1, \infty )\)
b. yote\(t\) hayo\(t∈(1,\infty)\)
19) Domain:\(\vecs r(t)=(\arccos t) \, \hat{\mathbf{i}} + \sqrt{2t−1} \, \hat{\mathbf{j}}+\ln(t) \, \hat{\mathbf{k}}\)
- Jibu
- \(\text{D}_{\vecs r}: \big[ \frac{1}{2}, 1 \big]\)
Kuangalia Kazi za Vector-Thamani
20) Eleza Curve iliyofafanuliwa na kazi yenye thamani ya vector\(\vecs r(t)=(1+t)\hat{\mathbf{i}}+(2+5t)\hat{\mathbf{j}}+(−1+6t)\hat{\mathbf{k}}\).
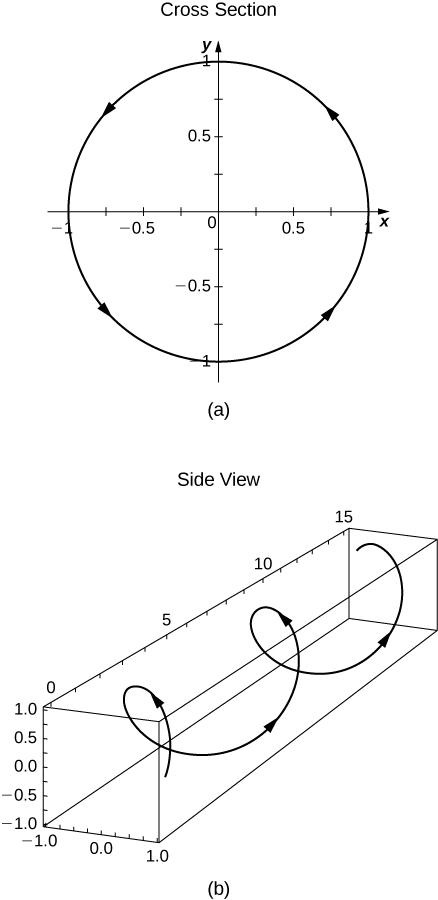
21) Hebu\(\vecs r(t)=⟨\cos t,t,\sin t⟩\) na uitumie kujibu maswali yafuatayo.
- Kwa maadili gani ya\(t\)\(\vecs r(t)\) yanaendelea?
- Mchoro grafu ya\(\vecs r(t)\).
- Jibu
- a.\(\vecs r\) ni kuendelea kwa idadi zote halisi, yaani, kwa\(t \in \mathbb{R}\).
Kumbuka kuwa kuna lazima iwe na\(z\) kwenye mhimili wima katika sehemu ya msalaba katika picha (a) chini badala ya\(y\).
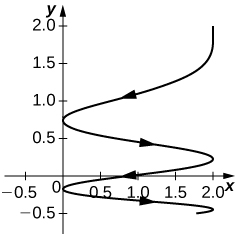
22) Kuzalisha mchoro makini wa grafu ya\(\vecs r(t) = t^2 \, \hat{\mathbf{i}} + t \, \hat{\mathbf{j}}\).
Katika maswali 23 - 25, tumia matumizi ya graphing ili mchoro kila kazi yenye thamani ya vector:
23) [T]\(\vecs r(t)=2 \cos^2 t \hat{\mathbf{i}}+(2−\sqrt{t})\hat{\mathbf{j}}\)
- Jibu
24) [T]\(\vecs r(t)=⟨e^{\cos (3t)},e^{−\sin(t)}⟩\)
25) [T]\(\vecs r(t)=⟨2−\sin (2t),3+2 \cos t⟩\)
- Jibu
Kutafuta Equations ndani\(x\) na\(y\) kwa Njia Iliyofuatiliwa na Kazi za Vector-Thamani
Kwa maswali 26-33, ondoa parameter\(t\), andika equation katika kuratibu za Cartesian, kisha mchoro grafu ya kazi za thamani ya vector.
26)\(\vecs r(t)=2t\hat{\mathbf{i}}+t^2 \hat{\mathbf{j}}\)
(kidokezo: Hebu\(x=2t\) na\(y=t^2\). Kutatua equation kwanza kwa\(t\) katika suala la\(x\) na mbadala matokeo haya katika equation pili.)
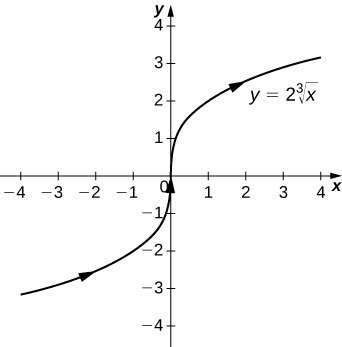
27)\(\vecs r(t)=t^3 \hat{\mathbf{i}}+2t \hat{\mathbf{j}}\)
- Jibu
-
\(y=2\sqrt[3]{x}\), tofauti ya kazi ya mizizi ya mchemraba
28)\(\vecs r(t)=\sin t\,\hat{\mathbf{i}}+\cos t\,\hat{\mathbf{j}}\)
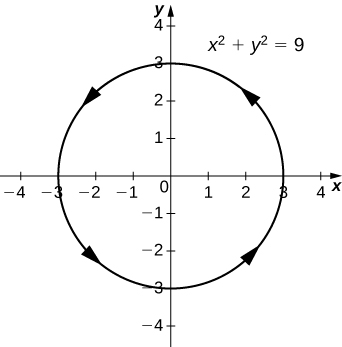
29)\(\vecs r(t)=3\cos t\,\hat{\mathbf{i}}+3\sin t\,\hat{\mathbf{j}}\)
- Jibu
-
\(x^2+y^2=9\), mduara unaozingatia\((0,0)\) na radius 3, na mwelekeo wa kinyume
30)\(\vecs r(t)=⟨ \sin t,4 \cos t⟩\)
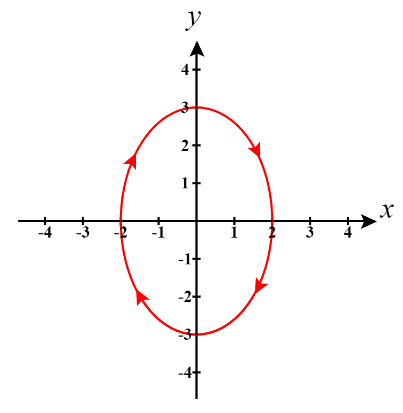
31)\(\vecs r(t)=2\sin t\,\hat{\mathbf{i}}-3\cos t\,\hat{\mathbf{j}}\)
- Jibu
-
\(\frac{x^2}{4}+\frac{y^2}{9}=1\), duaradufu unaozingatia\((0,0)\) na intercepts katika\(x = \pm2\) na\(y =\pm3\), na mwelekeo clockwise
32)\(\vecs r(t)=\tan t\,\hat{\mathbf{i}}-2\sec t\,\hat{\mathbf{j}}\)
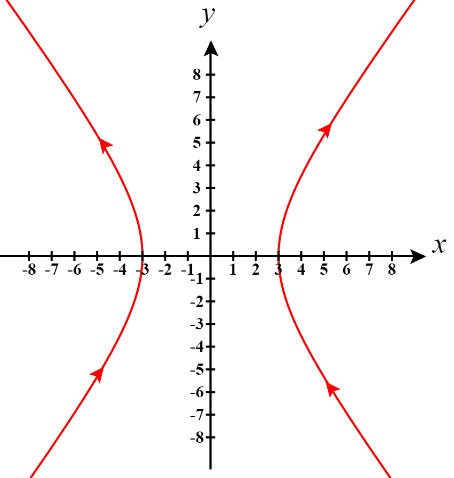
33)\(\vecs r(t)=3\sec t\,\hat{\mathbf{i}}+4\tan t\,\hat{\mathbf{j}}\)
- Jibu
-
\(\frac{x^2}{9}-\frac{y^2}{16}=1\), hyperbola unaozingatia katika\((0,0)\) na\(x\) -intercepts\((3, 0)\) na\((-3, 0)\), na mwelekeo umeonyesha
Kutafuta Kazi ya Vector-Thamani ya Kufuatilia Grafu ya Equation ndani\(x\) na\(y\)
Kwa maswali 34 - 40, tafuta kazi yenye thamani ya vector ambayo inatafuta safu iliyotolewa katika mwelekeo ulioonyeshwa.
34)\(4x^2+9y^2=36\); saa moja kwa moja na kinyume chake
35)\(y=x^2\); kutoka kushoto kwenda kulia
- Jibu
- \(\vecs r(t)=⟨t,t^2⟩\), ambapo\(t\) ongezeko
36) Mstari kupitia\(P\) na\(Q\) wapi\((1,4,−2)\) na\(P\)\(Q\) ni\((3,9,6)\)
37) Mduara\(x^2 + y^2 = 36\), unaoelekezwa saa moja kwa moja, na nafasi\((-6, 0)\) kwa wakati\(t = 0\).
- Jibu
- \(\vecs r(t)=-6\cos t\,\hat{\mathbf{i}}+6\sin t\,\hat{\mathbf{j}}\)
38) duaradufu\(x^2 + \dfrac{y^2}{36} = 1\), oriented kinyume chake
- Jibu
- \(\vecs r(t)=\cos t\,\hat{\mathbf{i}}+6\sin t\,\hat{\mathbf{j}}\)
39) Hyperbola\(\dfrac{y^2}{36} - x^2 = 1\), kipande cha juu kinaelekezwa kutoka kushoto-kulia
- Jibu
- \(\vecs r(t)=\tan t\,\hat{\mathbf{i}}+6\sec t\,\hat{\mathbf{j}}\)
40) Hyperbola\(\dfrac{x^2}{49} - \dfrac{y^2}{64} = 1\), kipande cha kulia kinaelekezwa kutoka chini-kwa-juu
- Jibu
- \(\vecs r(t)=7\sec t\,\hat{\mathbf{i}}+8\tan t\,\hat{\mathbf{j}}\)
Parameterizing Njia Piecewise
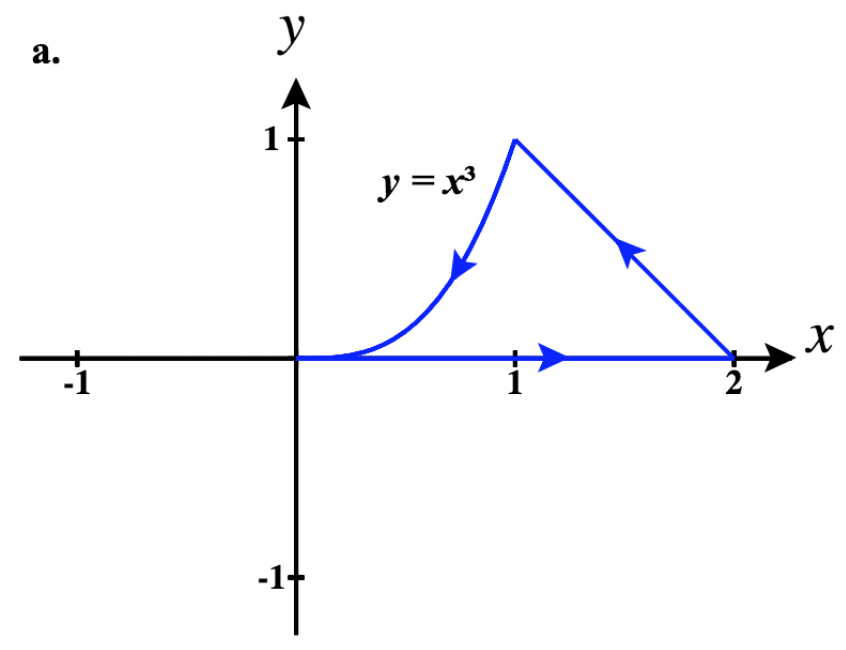
Kwa maswali 41 - 44, fanya parameterization kwa kila njia ya kipande. Jaribu kuandika parameterization ambayo huanza\(t = 0\) na inaendelea kupitia maadili ya\(t\) kama wewe hoja kutoka kipande moja hadi nyingine.
41)
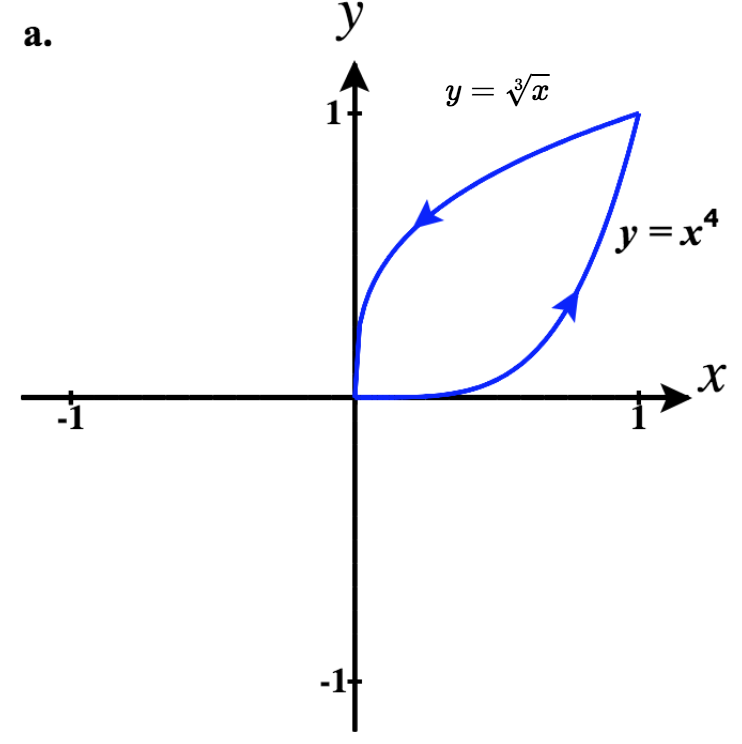

- Jibu
- a.\(\vecs r_1(t)= t\,\hat{\mathbf{i}} + t^4 \,\hat{\mathbf{j}}\) kwa\(0 \le t \le 1\)
\(\vecs r_2(t)= -t\,\hat{\mathbf{i}} + \sqrt[3]{-t} \,\hat{\mathbf{j}}\) Kwa\(-1 \le t \le 0\)
hiyo parameterization piecewise ya njia hii ni:
\ (\ vecs r (t) =\ kuanza {kesi}
t\,\ kofia {\ mathbf {i}} + t ^ 4\,\ kofia {\ mathbf {j}}, & 0\ le t\ le 1\\
\ kushoto (2-t\ kulia)\,\ kofia {\ mathbf {i}} +\ sqrt [3] {2-t}\,\ kofia {\ mathbf {j}}, & 1\ lt t
\ le 2\ mwisho {kesi}\)
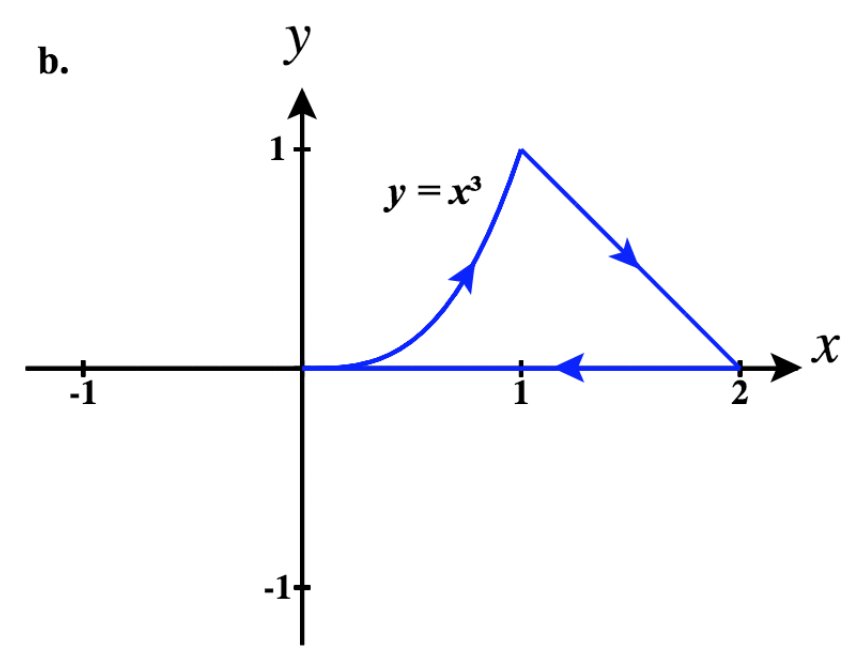
b.\(0 \le t \le 1\)
\(\vecs r_2(t)= -t\,\hat{\mathbf{i}} + (-t)^4 \,\hat{\mathbf{j}}\) kwa\(\vecs r_1(t)= t\,\hat{\mathbf{i}} + \sqrt[3]{t} \,\hat{\mathbf{j}}\) Kwa\(-1 \le t \le 0\)
hiyo kipande parameterization ya njia hii ni:
\ (\ vecs r (t) =\ kuanza {kesi}
t\,\ kofia {\ mathbf {i}} +\ sqrt [3] {t}\,\ kofia {\ mathbf {j}}, & 0\ le t\ le 1
\\ kushoto (2-t\ haki)\,\ kofia {\ mathbf {i}} +\ kushoto (2-t\ kulia) ^4\,\ kofia {\ mathbf {j}}, & 1\ lt t\ le 2
\ mwisho {kesi}\)
42)
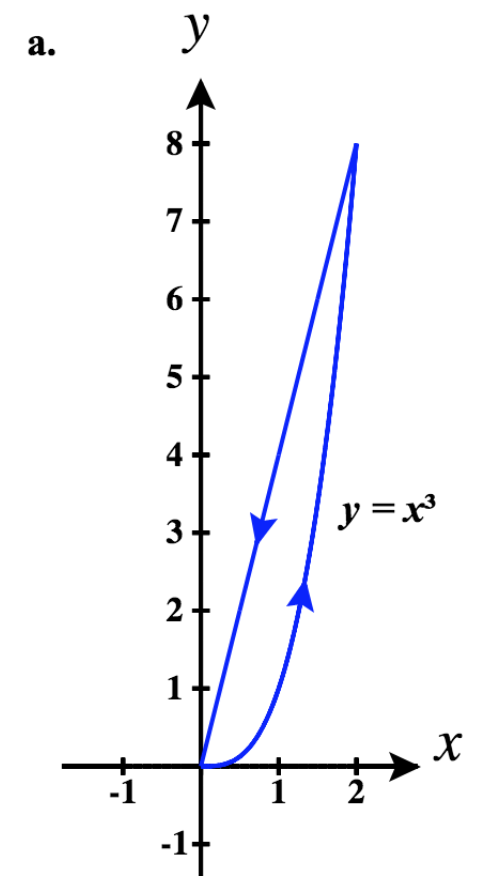
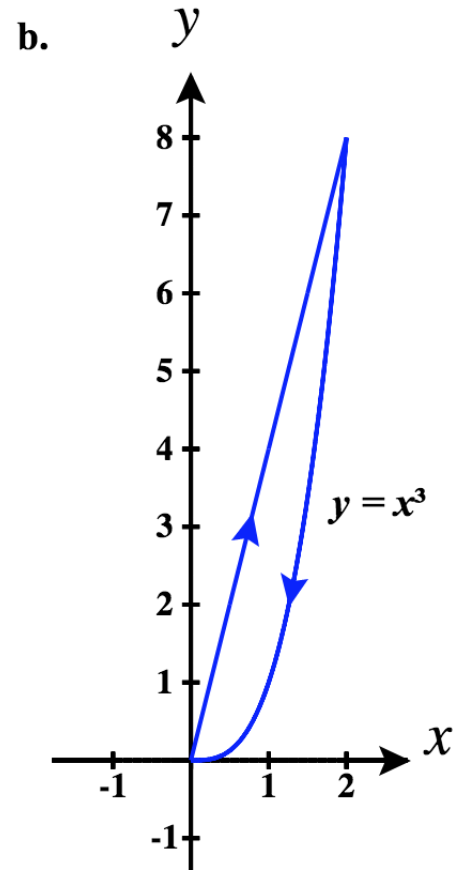
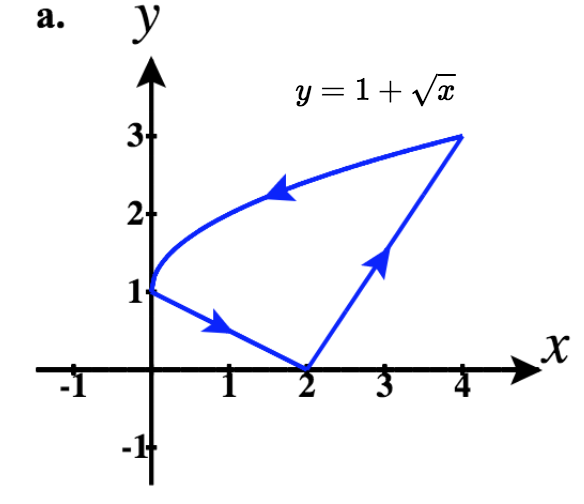
43)
- Jibu
- a.\(\vecs r_1(t)= t\,\hat{\mathbf{i}} +0 \,\hat{\mathbf{j}}\) kwa\(0 \le t \le 2\)
\(\vecs r_2(t)= -t\,\hat{\mathbf{i}} + \left(2 + t\right) \,\hat{\mathbf{j}}\)\(-2 \le t \le -1\)
\(\vecs r_3(t)= -t\,\hat{\mathbf{i}} + \left(-t\right)^3 \,\hat{\mathbf{j}}\) ajili ya Kwa\(-1 \le t \le 0\)
hiyo parameterization piecewise ya njia hii ni:
\ (\ vecs r (t) =\ kuanza {kesi}
t\,\ kofia {\ mathbf {i}}, & 0\ le t\ le 2\
\ kushoto (4-t\ haki)\,\ kofia {\ mathbf {i}} +\ kushoto (t-2\ haki)\,\ kofia {\ mathbf {j}}, & 2\ lt t\ le 3\
\ kushoto (4-t\ haki)\,\ kofia {\ mathbf {i} +\ kushoto (4-t\ kulia) ^3\,\ kofia {\ mathbf {j}}, & 3\ lt t\ le 4
\ mwisho {kesi}\)
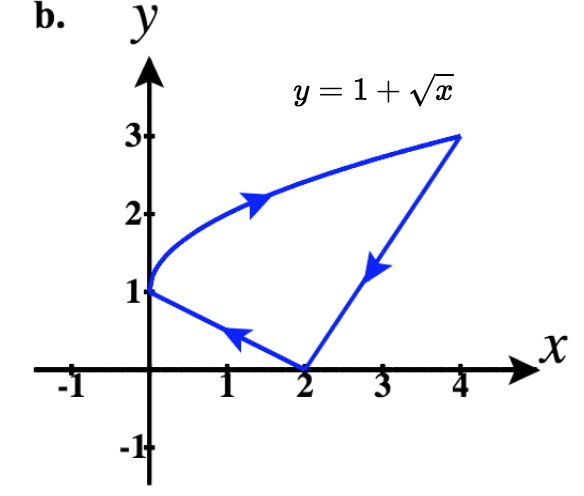
b.\(\vecs r_1(t)= t\,\hat{\mathbf{i}} + t^3 \,\hat{\mathbf{j}}\) kwa\(0 \le t \le 1\)
\(\vecs r_2(t)= t\,\hat{\mathbf{i}} + \left(2 - t\right) \,\hat{\mathbf{j}}\) kwa\(1 \le t \le 2\)
\(\vecs r_3(t)= -t\,\hat{\mathbf{i}} + 0 \,\hat{\mathbf{j}}\) kwa Kwa\(-2 \le t \le 0\)
hiyo parameterization ya kipande cha njia hii ni:
\ (\ vecs r (t) =\ kuanza {kesi}
t\,\ kofia {\ mathbf {i}} + t ^ 3\,\ kofia {\ mathbf {j}}, & 0\ le t\ le 1\\
t\,\ kofia {\ mathbf {i}} +\ kushoto (2 - t\ haki)\,\ kofia {\ mathbf {j}, & 1\ lt t\ le 2\
\ kushoto (4-t\\ kulia)\,\ kofia {\ mathbf {i}}, & 2\ lt t\ le 4
\ mwisho {kesi}\)
44)
Maswali ya Kazi ya Vector-Thamani
Kwa maswali 45 - 48, fikiria safu iliyoelezwa na kazi yenye thamani ya vector\(\vecs r(t)=(50e^{−t}\cos t)\hat{\mathbf{i}}+(50e^{−t}\sin t)\hat{\mathbf{j}}+(5−5e^{−t})\hat{\mathbf{k}}\).
45) Nini hatua ya awali ya njia sambamba na\(\vecs r(0)\)?
- Jibu
- \((50,0,0)\)
46) Ni nini\(\lim \limits_{t \to \infty} \vecs r(t) \)?
47) [T] Matumizi ya teknolojia ya mchoro Curve.
- Jibu
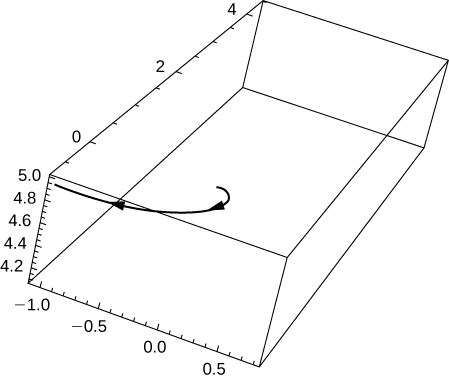
48) Ondoa parameter t kuonyesha kwamba\(z=5−\dfrac{r}{10}\) wapi\(r^2=x^2+y^2\).
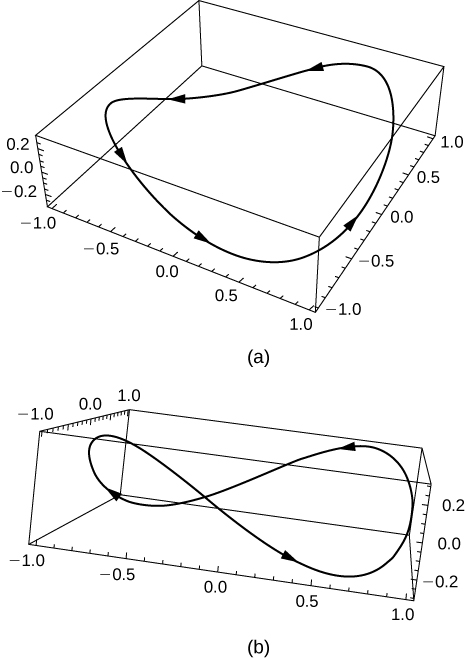
49) [T] Hebu\(\vecs r(t)=\cos t \hat{\mathbf{i}}+\sin t\hat{\mathbf{j}}+0.3 \sin (2t)\hat{\mathbf{k}}\). Tumia teknolojia ya kuchora safu (inayoitwa curve ya coaster-coaster) juu ya muda\([0,2\pi)\). Chagua angalau maoni mawili ili kuamua kilele na mabonde.
- Jibu
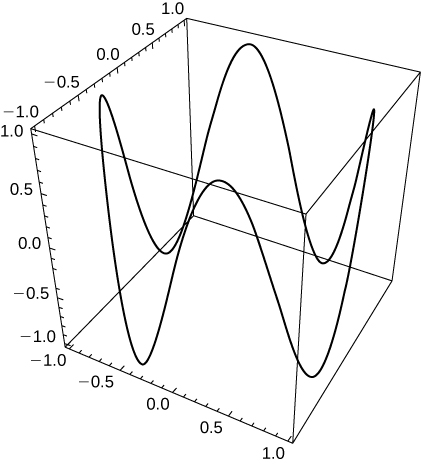
50) [T] Tumia matokeo ya tatizo lililotangulia kujenga equation ya coaster roller na kushuka mwinuko kutoka kilele na mwinuko kutembea kutoka “bonde.” Kisha, kutumia teknolojia ya grafu equation.
51) Tumia matokeo ya matatizo mawili yaliyotangulia ili kujenga usawa wa njia ya coaster ya roller na pointi zaidi ya mbili za kugeuka (kilele na mabonde).
- Jibu
-
Uwezekano mmoja ni\(\vecs r(t)=\cos t \hat{\mathbf{i}}+\sin t\hat{\mathbf{j}}+\sin (4t)\hat{\mathbf{k}}\). Kwa kuongeza\(t\) mgawo wa sehemu ya tatu, idadi ya pointi za kugeuka zitaongezeka.
52) Kukamilisha uchunguzi wafuatayo.
- Graph Curve\(\vecs r(t)=(4+\cos(18t))\cos(t)\hat{\mathbf{i}}+(4+\cos (18t)\sin (t))\hat{\mathbf{j}}+0.3 \sin(18t)\hat{\mathbf{k}}\) kutumia pembe mbili viewing ya uchaguzi wako kuona sura ya jumla ya Curve.
- Je, Curve inafanana na “slinky”?
- Ni mabadiliko gani ya equation yanapaswa kufanywa ili kuongeza idadi ya coils ya slinky?
Wachangiaji
Paul Seeburger (Monroe Community College) kuundwa matatizo 12, 14, 19, 22, 30-33, 37- 44.