
4.6: Movimento relativo em uma e duas dimensões
- Page ID
- 185336

- Explique o conceito de quadros de referência.
- Escreva as equações vetoriais de posição e velocidade para o movimento relativo.
- Desenhe os vetores de posição e velocidade para o movimento relativo.
- Analise problemas de movimento relativo unidimensional e bidimensional usando as equações vetoriais de posição e velocidade.
O movimento não acontece isoladamente. Se você estiver viajando em um trem movendo-se a 10 m/s para o leste, essa velocidade é medida em relação ao solo no qual você está viajando. No entanto, se outro trem passar por você a 15 m/s leste, sua velocidade em relação a esse outro trem será diferente da sua velocidade em relação ao solo. Sua velocidade em relação ao outro trem é de 5 m/s oeste. Para explorar mais essa ideia, primeiro precisamos estabelecer alguma terminologia.
Frames de referência
Para discutir o movimento relativo em uma ou mais dimensões, primeiro introduzimos o conceito de quadros de referência. Quando dizemos que um objeto tem uma certa velocidade, devemos afirmar que ele tem uma velocidade em relação a um determinado quadro de referência. Na maioria dos exemplos que examinamos até agora, esse quadro de referência tem sido a Terra. Se você diz que uma pessoa está sentada em um trem se movendo a 10 m/s para o leste, então você insinua que a pessoa no trem está se movendo em relação à superfície da Terra nessa velocidade, e a Terra é o quadro de referência. Podemos expandir nossa visão do movimento da pessoa no trem e dizer que a Terra está girando em sua órbita ao redor do Sol. Nesse caso, o movimento se torna mais complicado. Nesse caso, o sistema solar é o quadro de referência. Em resumo, toda discussão sobre movimento relativo deve definir os quadros de referência envolvidos. Agora, desenvolvemos um método para nos referirmos a quadros de referência em movimento relativo.
Movimento relativo em uma dimensão
Primeiro, introduzimos o movimento relativo em uma dimensão, porque os vetores de velocidade se simplificam para ter apenas duas direções possíveis. Veja o exemplo da pessoa sentada em um trem se movendo para o leste. Se escolhermos o leste como a direção positiva e a Terra como o quadro de referência, podemos escrever a velocidade do trem em relação à Terra como\(\vec{v}_{TE}\) = 10 m/s\(\hat{i}\) leste, onde os subscritos TE se referem ao trem e à Terra. Agora, digamos que a pessoa se levante do assento e caminhe em direção à parte de trás do trem a 2 m/s. Isso nos indica que ela tem uma velocidade em relação à estrutura de referência do trem. Como a pessoa está caminhando para o oeste, na direção negativa, escrevemos sua velocidade em relação ao trem como\(\vec{v}_{PT}\) = −2 m/s\(\hat{i}\). Podemos adicionar os dois vetores de velocidade para encontrar a velocidade da pessoa em relação à Terra. Essa velocidade relativa é escrita como
\[\vec{v}_{PE} = \vec{v}_{PT} + \vec{v}_{TE} \ldotp \label{4.33}\]
Observe a ordem dos subscritos para os vários quadros de referência em Equation\ ref {4.33}. Os subscritos do quadro de referência do acoplamento, que é o trem, aparecem consecutivamente no lado direito da equação. A figura\(\PageIndex{1}\) mostra a ordem correta dos subscritos ao formar a equação vetorial.
Somando os vetores, encontramos\(\vec{v}_{PE}\) = 8 m/s\(\hat{i}\), então a pessoa está se movendo 8 m/s para o leste em relação à Terra. Graficamente, isso é mostrado na Figura\(\PageIndex{2}\).
Velocidade relativa em duas dimensões
Agora podemos aplicar esses conceitos para descrever o movimento em duas dimensões. Considere uma partícula P e os quadros de referência S e S′s, conforme mostrado na Figura\(\PageIndex{3}\). A posição da origem de S′medida em S é\(\vec{r}_{S'S}\), a posição de P medida em S′s é\(\vec{r}_{PS'}\) e a posição de P medida em S é\(\vec{r}_{PS}\).
Da Figura\(\PageIndex{3}\), vemos que
\[\vec{r}_{PS} = \vec{r}_{PS} + \vec{r}_{S'S} \ldotp \label{4.34}\]
As velocidades relativas são as derivadas temporais dos vetores de posição. Portanto,
\[\vec{v}_{PS} = \vec{v}_{PS'} + \vec{v}_{S'S} \ldotp \label{4.35}\]
A velocidade de uma partícula em relação a S é igual à sua velocidade em relação a S′mais a velocidade de S′em relação a S.
Podemos estender a Equação\ ref {4,35} para qualquer número de quadros de referência. Para a partícula P com velocidades\(\vec{v}_{PA}\),\(\vec{v}_{PB}\), e\(\vec{v}_{PC}\) nos quadros A, B e C,
\[\vec{v}_{PC} = \vec{v}_{PA} + \vec{v}_{AB} + \vec{v}_{BC} \ldotp \label{4.36}\]
Também podemos ver como as acelerações estão relacionadas, conforme observado em dois quadros de referência, diferenciando a Equação\ ref {4.35}:
\[\vec{a}_{PS} = \vec{a}_{PS'} + \vec{a}_{S'S} \ldotp \label{4.37}\]
Vemos que se a velocidade de S′em relação a S é uma constante, então\(\vec{a}_{S'S}\) = 0 e
\[\vec{a}_{PS} = \vec{a}_{PS'} \ldotp \label{4.38}\]
Isso diz que a aceleração de uma partícula é a mesma medida por dois observadores se movendo a uma velocidade constante em relação um ao outro.
Um caminhão está viajando para o sul a uma velocidade de 70 km/h em direção a um cruzamento. Um carro está viajando para o leste em direção ao cruzamento a uma velocidade de 80 km/h (Figura\(\PageIndex{4}\)). Qual é a velocidade do carro em relação ao caminhão?
Estratégia
Primeiro, devemos estabelecer o quadro de referência comum a ambos os veículos, que é a Terra. Em seguida, escrevemos as velocidades de cada um em relação ao quadro de referência da Terra, o que nos permite formar uma equação vetorial que liga o carro, o caminhão e a Terra para resolver a velocidade do carro em relação ao caminhão.
Solução
A velocidade do carro em relação à Terra é\(\vec{v}_{CE}\) = 80 km/h\(\hat{i}\). A velocidade do caminhão em relação à Terra é\(\vec{v}_{TE}\) = −70 km/h\(\hat{j}\). Usando a regra de adição de velocidade, a equação de movimento relativo que estamos buscando é
\[\vec{v}_{CT} = \vec{v}_{CE} + \vec{v}_{ET} \ldotp \label{ex2}\]
Aqui\(\vec{v}_{CT}\) está a velocidade do carro em relação ao caminhão, e a Terra é o quadro de referência de conexão. Como temos a velocidade do caminhão em relação à Terra, o negativo desse vetor é a velocidade da Terra em relação ao caminhão:\(\vec{v}_{ET} = − \vec{v}_{TE}\). O diagrama vetorial dessa equação é mostrado na Figura\(\PageIndex{5}\).
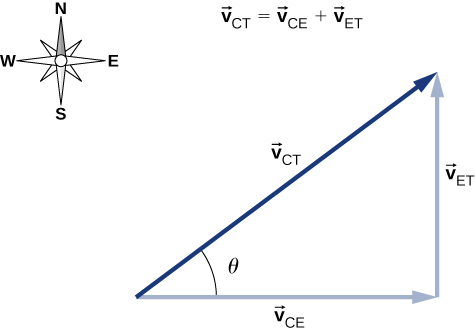
Agora podemos resolver a velocidade do carro em relação ao caminhão:
\[\big| \vec{v}_{CT} \big| = \sqrt{(80.0\; km/h)^{2} + (70.0\; km/h)^{2}} = 106.\; km/h \nonumber\]
e
\[\theta = \tan^{-1} \left(\dfrac{70.0}{80.0}\right) = 41.2^{o}\; north\; of\; east \ldotp \nonumber\]
Significância
Desenhar um diagrama vetorial mostrando os vetores de velocidade pode ajudar a entender a velocidade relativa dos dois objetos.
Um barco segue para o norte em águas calmas a 4,5 m/s diretamente através de um rio que corre para o leste a 3,0 m/s. Qual é a velocidade do barco em relação à Terra?
Um piloto deve pilotar seu avião para o norte para chegar ao seu destino. O avião pode voar a 300 km/h em ar parado. Um vento está soprando do nordeste a 90 km/h. (a) Qual é a velocidade do avião em relação ao solo? (b) Em que direção o piloto deve dirigir seu avião para voar para o norte?
Estratégia
O piloto deve apontar seu avião um pouco a leste do norte para compensar a velocidade do vento. Precisamos construir uma equação vetorial que contenha a velocidade do plano em relação ao solo, a velocidade do plano em relação ao ar e a velocidade do ar em relação ao solo. Como essas duas últimas quantidades são conhecidas, podemos resolver a velocidade do avião em relação ao solo. Podemos representar graficamente os vetores e usar esse diagrama para avaliar a magnitude da velocidade do avião em relação ao solo. O diagrama também nos dirá o ângulo que a velocidade do avião faz com o norte em relação ao ar, que é a direção em que o piloto deve dirigir seu avião.
Solução
A equação vetorial é\(\vec{v}_{PG} = \vec{v}_{PA} + \vec{v}_{AG}\), onde P = plano, A = ar e G = solo. A partir da geometria na Figura\(\PageIndex{6}\), podemos resolver facilmente a magnitude da velocidade do plano em relação ao solo e o ângulo de direção do avião,\(\theta\).
- Quantidades conhecidas: $$\ big|\ vec {v} _ {PA}\ big| = 300\; km/h$$ $$\ big|\ vec {v} _ {AG}\ big| = 90\; KM/H$$ Substituindo na equação do movimento, obtemos\(\big| \vec{v}_{PG} \big|\) = 230 km/h.
- O ângulo\(\theta\) = tan −1\(\left(\dfrac{63.64}{300}\right)\) = 12° a leste do norte.