
15.6: 阻尼振荡
- Page ID
- 205029

- 描述阻尼谐波运动的运动
- 写出阻尼谐波振荡的运动方程
- 描述被驱动或强制阻尼谐波运动的运动
- 写出强制阻尼谐波运动的运动方程
在现实世界中,振荡很少跟随真正的 SHM。 某种形式的摩擦通常会抑制运动,使其消失,或者需要更多的力量才能继续。 在本节中,我们将研究一些阻尼谐波运动的示例,并了解如何修改运动方程来描述这种更一般的案例。
弹奏几秒钟后,吉他弦停止振动。 要继续在游乐场秋千上挥杆,你必须继续推动(图\(\PageIndex{1}\))。 尽管我们经常可以使摩擦力和其他非保守力变小或可以忽略不计,但完全没有阻尼的运动很少见。 实际上,我们甚至可能想抑制振荡,例如使用汽车减震器。

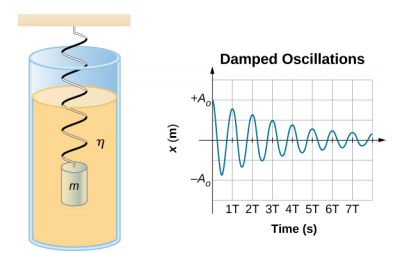
图中\(\PageIndex{2}\)显示了附着在弹簧上的质量 m,力常数 k。质量被提升到位置 A 0,即初始振幅,然后释放。 质量在具有粘度的流体中围绕平衡位置振荡,但每次振荡的振幅都会减小。 对于具有少量阻尼的系统,周期和频率是恒定的,与 SHM 几乎相同,但振幅逐渐减小,如图所示。 之所以出现这种情况,是因为非保守的阻尼力会从系统中移除能量,通常以热能的形式消失。
以作用于群众的力量为例。 请注意,权重的唯一贡献是改变均衡位置,如本章前面所述。 因此,净力等于弹簧的力和阻尼力 (\(F_D\))。 如果速度的大小很小,这意味着质量振荡得很慢,则阻尼力与速度成正比并作用于运动方向 (\(F_D = −b\))。 因此,质量上的净力为
\[ma = -bv - kx \ldotp\]
把它写成 x 中的微分方程,我们得到
\[m \frac{d^{2} x}{dt^{2}} + b \frac{dx}{dt} + kx = 0 \ldotp \label{15.23}\]
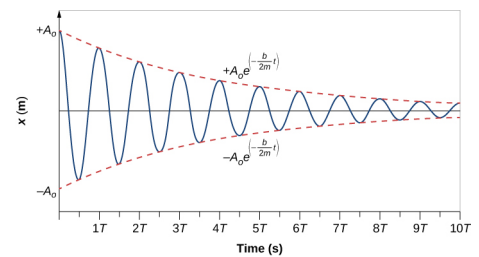
要确定该方程的解,请考虑图中所示的位置与时间关系图\(\PageIndex{3}\)。 该曲线类似于在指数函数包络中振荡的余弦曲线,\(A_0e^{−\alpha t}\)其中\(\alpha = \frac{b}{2m}\)。 解决的办法是
\[x(t) = A_{0} e^{- \frac{b}{2m} t} \cos (\omega t + \phi) \ldotp \label{15.24}\]
这只能作为一种练习来证明这其实是解决办法。 为了证明这是正确的解,请取相对于时间的一阶和二阶导数,并将其替换为方程式15.23。 结果发现,方程式 15.24 是解
\[\omega = \sqrt{\frac{k}{m} - \left(\dfrac{b}{2m}\right)^{2}} \ldotp\]
回想一下,经过 SHM 的质量的角频率等于力常数的平方根除以质量。 这通常被称为自然角频率,表示为
\[\omega_{0} = \sqrt{\frac{k}{m}} \ldotp \label{15.25}\]
阻尼谐波运动的角频率变为
\[\omega = \sqrt{\omega_{0}^{2} - \left(\dfrac{b}{2m}\right)^{2}} \ldotp \label{15.26}\]
回想一下,当我们开始描述阻尼谐波运动时,我们说阻尼必须很小。 我想到了两个问题。 为什么阻尼必须很小? 那么有多小才是小呢? 如果您逐渐增加系统中的阻尼量,则周期和频率开始受到影响,因为阻尼与来回运动相反,因此会减慢来回运动的速度。 (两个方向的净力都较小。) 如果阻尼非常大,系统甚至不会振荡,它会慢慢走向平衡。 角频率等于
\[\omega = \sqrt{\frac{k}{m} - \left(\dfrac{b}{2m}\right)^{2}} \ldotp\]
随着 b 的增加,\(\frac{k}{m} - \left(\dfrac{b}{2m}\right)^{2}\)变小并在 b = 时最终变为零\(\sqrt{4mk}\)。 如果 b 变大,则\(\frac{k}{m} - \left(\dfrac{b}{2m}\right)^{2}\)变为负数\(\sqrt{\frac{k}{m} - \left(\dfrac{b}{2m}\right)^{2}}\)且为复数。
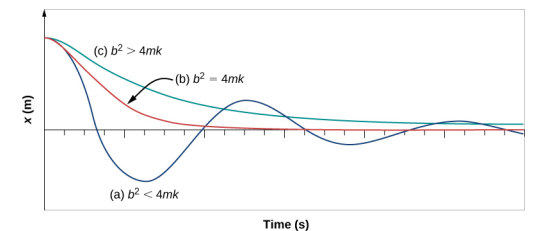
图中\(\PageIndex{4}\)显示了谐波振荡器在不同阻尼量下的位移。
- 当阻尼常数 b < 较小时\(\sqrt{4mk}\),系统会振荡,而运动振幅呈指数级衰减。 据说该系统阻尼不足,如曲线 (a) 所示。 许多系统阻尼不足,在振幅呈指数级减小的同时振荡,例如质量在弹簧上振荡。 阻尼可能很小,但质量最终会停止。
- 如果阻尼常数为\(b = \sqrt{4mk}\),则系统被称为临界阻尼,如曲线 (\(b\)) 所示。 严重阻尼系统的一个例子是汽车中的减震器。 尽可能快地使振荡衰减是有利的。 在这里,系统不会振荡,而是尽可能快地渐近地接近平衡状态。
- 图中的曲线 (c)\(\PageIndex{4}\) 代表过阻尼系统,其中\(b > \sqrt{4mk}\)。 过阻的系统将在更长的时间内接近平衡。
通常需要临界阻尼,因为这样的系统会迅速恢复平衡并保持平衡。 此外,施加于临界阻尼系统的恒定力可在尽可能短的时间内将系统移动到新的平衡位置,而不会在新的位置上过冲或振荡。
为什么完全无阻尼的谐波振荡器如此罕见?