
15.3:简单谐波运动中的能量
- Page ID
- 204998

- 描述质量和弹簧系统的节能
- 解释稳定和不稳定平衡点的概念
要在物体中产生变形,我们必须努力。 也就是说,无论你是弹吉他弦还是压缩汽车的减震器,都必须通过一定距离施加力。 如果唯一的结果是变形,并且没有功率进入热能、声音能或动能,那么所有功率最初都作为某种形式的势能存储在变形物体中。
举一个附着在无摩擦工作台上的弹簧上的方块在 SHM 中振荡的例子。 弹簧的力是一种保守力(您在势能和能量守恒一章中对此进行了研究),我们可以为其定义潜在能量。 这种势能是弹簧伸展或压缩时储存在弹簧中的能量。 在这种情况下,方块在一个维度上振荡,弹簧的力与运动平行作用:
\[W = \int_{x_{i}}^{x_{f}} F_{x} dx \int_{x_{i}}^{x_{f}} -kxdx = \Big[ - \frac{1}{2} kx^{2} \Big]_{x_{i}}^{x_{f}} = - \Big[ \frac{1}{2} kx_{f}^{2} - \frac{1}{2} kx_{i}^{2} \Big] = - [U_{f} - U_{i}] = - \Delta U \ldotp\]
在考虑储存在弹簧中的能量时,标记为 x i = 0.00 m 的平衡位置是弹簧中存储的能量等于零的位置。 当弹簧被拉伸或压缩一个距离 x 时,弹簧中存储的势能为
\[U = \frac{1}{2} kx^{2} \ldotp\]
能量和简单谐波振荡器
要研究简单谐波振荡器的能量,我们需要考虑所有形式的能量。 举一个附着在弹簧上的方块放在无摩擦表面上,在 SHM 中振荡的例子。 弹簧变形中存储的势能是
\[U = \frac{1}{2} kx^{2} \ldotp\]
在简单的谐波振荡器中,能量在质量 K =\(\frac{1}{2}\) mv 2 的动能和储存在弹簧中的势能 U =\(\frac{1}{2}\) kx 2 之间振荡。 在质量和弹簧系统的 SHM 中,没有耗散力,因此总能量是势能和动能的总和。 在本节中,我们将考虑系统的能量守恒问题。 所研究的概念适用于所有简单的谐波振荡器,包括那些由引力起作用的谐波振荡器。
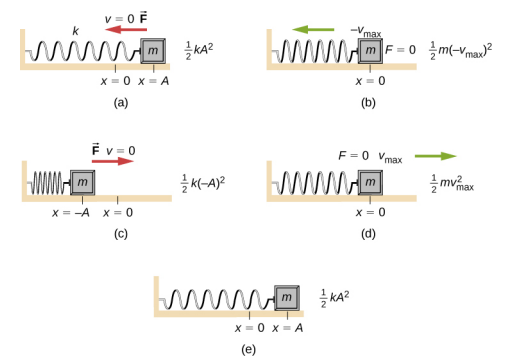
以图(图)为例\(\PageIndex{1}\),该图显示了附着在弹簧上的振动块。 在无阻尼的 SHM 中,能量在动能和势位之间来回摆动,随着系统的振荡,能量完全从一种形式转移到另一种形式。 因此,举一个附着在弹簧上的无摩擦表面上的物体的简单例子,运动从弹簧中存储的所有能量作为弹性势能开始。 当物体开始移动时,弹性势能被转化为动能,在平衡位置变成完全的动能。 然后,弹簧在拉伸或压缩时将能量转化为弹性势能。 当动能完全转换后,速度变为零,然后重复这个循环。 了解这些循环中的能量守恒将在此处以及SHM的后续应用(例如交流电路)中提供更多见解。
以图为\(\PageIndex{1}\)例,它显示了周期性运动中特定点的能量。 在保持恒定的同时,能量在方块的动能和弹簧中存储的势能之间振荡:
\[E_{Total} = U + K = \frac{1}{2} kx^{2} + \frac{1}{2} mv^{2} \ldotp\]
在 SHM 中,方块在弹簧上的运动由位置 x (t) = Acos\(\omega\) t +\(\phi\)) 定义,速度为 v (t) = −A\(\omega\) sin (\(\omega\)t +\(\phi\))。 使用这些方程,三角恒等式 cos 2\(\theta\) + sin 2\(\theta\) = 1\(\omega = \sqrt{\frac{k}{m}}\),我们可以找到系统的总能量:
\[\begin{split} E_{Total} & = \frac{1}{2} kA^{2} \cos^{2} (\omega t + \phi) + \frac{1}{2} mA^{2} \omega^{2} \sin^{2} (\omega t + \phi) \\ & = \frac{1}{2} kA^{2} \cos^{2} (\omega t + \phi) + \frac{1}{2} mA^{2} \left(\dfrac{k}{m}\right) \sin^{2} (\omega t + \phi) \\ & = \frac{1}{2} kA^{2} \cos^{2} (\omega t + \phi) + \frac{1}{2} kA^{2} \sin^{2} (\omega t + \phi) \\ & = \frac{1}{2} kA^{2} \cos^{2} (\omega t + \phi) + \frac{1}{2} mA^{2} \omega^{2} \sin^{2} (\omega t + \phi) \\ & = \frac{1}{2} kA^{2} (\cos^{2} (\omega t + \phi) + \sin^{2} (\omega t + \phi)) \\ & = \frac{1}{2} kA^{2} \ldotp \end{split}\]
方块和弹簧系统的总能量等于弹簧中存储的势能之和加上方块的动能,并且与振幅 E T otal =\(\left(\dfrac{1}{2}\right)\) kA 2 的平方成正比。 系统的总能量是恒定的。
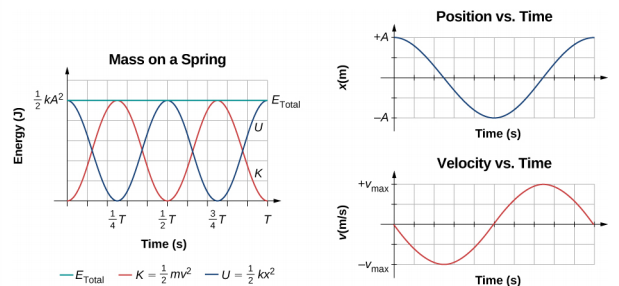
仔细观察系统的能量就会发现,动能像正弦平方函数一样振荡,而势能像余弦平方函数一样振荡。 但是,系统的总能量是恒定的,与振幅的平方成正比。 该图\(\PageIndex{2}\)显示了方块和弹簧系统的势能、动能和总能量随时间变化的曲线。 还绘制了随时间变化的位置和速度。 在时间 t = 0.0 秒之前,方块附着在弹簧上并放置在平衡位置。 通过施加外力,将其拉到 x = + A 的位置来完成方块的工作。系统现在在弹簧中储存了势能。 在时间 t = 0.00 s 时,方块的位置等于振幅,储存在弹簧中的势能等于 U =\(\frac{1}{2}\) kA 2,方块上的力为最大且指向负 x 方向(F S = −kA)。 在时间 t = 0.00 s 时,方块的速度和动能为零。在时间 t = 0.00 s 时,方块从静止状态中释放。
关于平衡位置的振荡
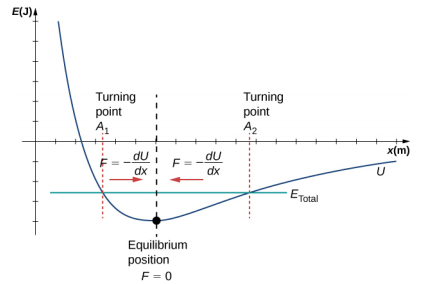
我们刚刚将SHM的能量视为时间的函数。 简单谐波振荡器的另一个有趣观点是将能量视为位置的函数。 该图\(\PageIndex{3}\)显示了正在进行 SHM 的系统的能量与位置的对比图。
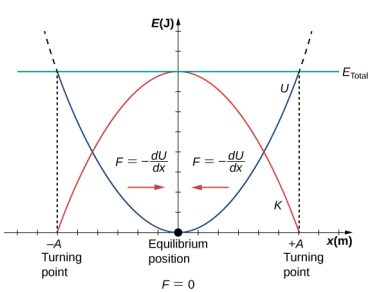
图中的势能曲线\(\PageIndex{3}\)类似于一个碗。 当将大理石放入碗中时,它会沉淀到碗的最低点(x = 0)的平衡位置。 之所以发生这种情况,是因为恢复力指向平衡点。 这个平衡点有时被称为定点。 当大理石受到干扰到不同的位置(x = + A)时,大理石会围绕平衡位置振荡。 回顾势能图,通过观察势能图的斜率(F = −\(\frac{dU}{dx}\))可以找到力。 由于定点两侧的力指向平衡点,因此平衡点被称为稳定的平衡点。 点 x = A 和 x = −A 被称为转折点。 (参见 “潜在能量和节能”。) 稳定性是一个重要的概念。 如果平衡点是稳定的,则最初处于稳定平衡点的物体受到轻微干扰将导致该物体围绕该点振荡。 之所以出现稳定的平衡点,是因为两侧的力都指向它。 对于不稳定的平衡点,如果物体受到轻微干扰,它不会返回到平衡点。
以碗中的大理石为例。 如果碗向右向上,则大理石如果受到轻微干扰,将在稳定的平衡点周围振荡。 如果将碗倒过来,则大理石可以在顶部保持平衡,即净力为零的平衡点。 但是,如果大理石受到轻微的干扰,它不会回到平衡点,而是会从碗里滚下来。 原因是平衡点两侧的力都偏离该点。 这个点是一个不稳定的平衡点。
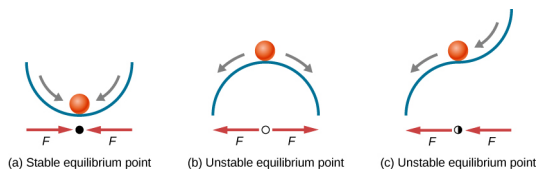
图中\(\PageIndex{4}\)显示了三个条件。 第一个是稳定的平衡点 (a),第二个是不稳定的平衡点 (b),最后一个也是不稳定的平衡点 (c),因为只有一侧的力指向平衡点。
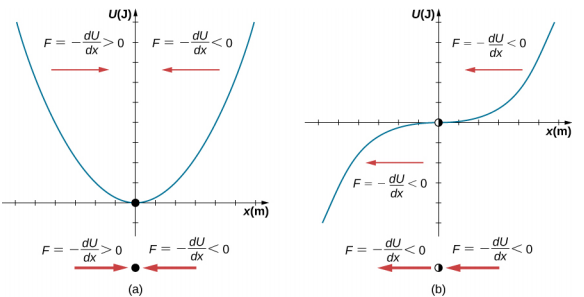
确定平衡点是稳定还是不稳定的过程可以正式化。 以图中所示的势能曲线为例\(\PageIndex{5}\)。 通过分析图形的斜率可以找到力。 力为 F = −\(\frac{dU}{dx}\)。 在 (a) 中,定点位于 x = 0.00 m。当 x < 0.00 m 时,力为正。 当 x > 0.00 m 时,力为负。 这是一个稳定的点。 在 (b) 中,定点位于 x = 0.00 m 处。当 x < 0.00 m 时,力为负。 当 x > 0.00 m 时,力也为负。 这是一个不稳定的问题。
稳定平衡点概念的实际应用是分子中两个中性原子之间的力。 如果两个分子相距很近,相隔几个原子直径,它们就会感受到一种吸引人的力。 如果分子移动得足够近以至于其他电子的电子壳重叠,则分子之间的力就会变得令人反感。 两个原子之间的吸引力可能导致原子形成分子。 两个分子之间的力不是线性力,不能简单地建模为两个质量被弹簧隔开,但是当从平衡位置偏离少量时,分子的原子可以围绕平衡点振荡。 原子由于两个原子之间的吸引力和排斥力而振荡。
以两个原子之间相互作用的一个例子为例,即范德华相互作用。 深入讨论两个原子的相互作用超出了本章的范围,但是可以通过考虑系统势能模型的一个例子来研究原子的振荡。 对这种分子的势能进行建模的一个建议是使用 Lennard-Jones 6-12 的电位:
\[U(x) = 4 \epsilon \Bigg[ \left(\dfrac{\sigma}{x}\right)^{12} - \left(\dfrac{\sigma}{x}\right)^{6} \Bigg] \ldotp\]
此函数的图表如图所示\(\PageIndex{6}\)。 这两个参数\(\epsilon\)和\(\sigma\)是通过实验找到的。
从图中可以看到有一个势能井,它与图中讨论的简单谐波振荡器的势能函数的势能函数的势能井有一些相似之处\(\PageIndex{3}\)。 伦纳德-琼斯势具有稳定的平衡点,其中势能最小,平衡点两侧的力都指向平衡点。 请注意,与简单的谐波振荡器不同,伦纳德-琼斯电位的电位井不是对称的。 这是因为原子之间的力不是胡克定律力,也不是线性的。 原子仍然可以在平衡位置 x min 周围振荡,因为当 x < x min 时,力为正;当 x > x min 时,力为负。 请注意,当 x 接近零时,斜率相当陡峭且为负,这意味着力很大且为正。 这表明尝试将原子推近需要很大的力。 随着 x 变得越来越大,斜率变得不那么陡峭,力变小且为负。 这表明,如果给定足够大的能量,原子就可以分离。
如果你对这种相互作用感兴趣,可以通过取势能函数的导数来找出分子之间的力。 你会立即看到该力与胡克定律力(F = −kx)不相似,但是如果你熟悉二项式定理:
\[(1 + x)^{n} = 1 + nx + \frac{n(n - 1)}{2!} x^{2} + \frac{n(n - 1)(n - 2)}{3!} x^{3} + \cdots,\]
力可以用胡克定律力近似。
速度和节能
回到图中方块和弹簧的系统\(\PageIndex{1}\),一旦方块从静止状态中释放出来,它就会开始朝负方向向平衡位置移动。 势能减小,速度和动能的大小增加。 在时间 t = 时\(\frac{T}{4}\),方块到达平衡位置 x = 0.00 m,方块上的力和势能为零。 在平衡位置,方块达到负速度,其幅度等于最大速度 v = −A\(\omega\)。 动能为最大值,等于 K =\(\frac{1}{2}\) mv 2 = m\(\frac{1}{2}\) A 2 Ω\(\omega^{2}\) =\(\frac{1}{2}\) kA 2。 此时,方块上的力为零,但动量承载方块,并沿负方向继续朝向 x = −A 方向移动。随着方块继续移动,其上的力朝正方向起作用,速度和动能的大小减小。 随着弹簧的压缩,势能增加。 在时间 t = 时\(\frac{T}{2}\),方块到达 x = −A。这里的速度和动能等于零。 方块上的力为 F = + kA,弹簧中存储的势能为 U =\(\frac{1}{2}\) kA 2。 在振荡期间,总能量是恒定的,等于系统的势能和动能之和,
\[E_{Total} = \frac{1}{2} kx^{2} + \frac{1}{2} mv^{2} = \frac{1}{2} kA^{2} \ldotp \label{15.12}\]
可以求解与 SHM 相关的能量方程以找出任何位置的速度大小:
\[|v| = \sqrt{\frac{k}{m} (A^{2} - x^{2})} \ldotp \label{15.13}\]
简单谐波振荡器中的能量与振幅的平方成正比。 在考虑多种形式的振荡时,你会发现能量与振幅的平方成正比。
即使每个系统的位移相等,如果你用尺子折断手,为什么比用松动的弹簧折断手会更痛苦?
找出一种方法可以降低简单谐波振荡器的最大速度。