15.2: 简单谐波运动
- Page ID
- 205020

- 定义周期和频率这两个术语
- 列出简单谐波运动的特征
- 解释相移的概念
- 为正在经历简单谐波运动的质量和弹簧系统写下运动方程
- 描述质量体在垂直弹簧上振荡的运动
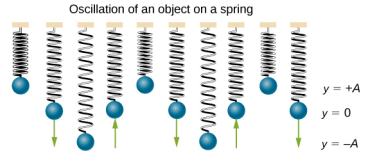
当你弹吉他弦时,生成的声音具有稳定的音调并持续很长时间(图\(\PageIndex{1}\))。 琴弦围绕平衡位置振动,当琴弦从初始位置开始,移动到其中一个极端位置,然后移动到另一个极端位置,然后返回到其初始位置时,一次振荡就完成了。 我们将周期性运动定义为任何以固定时间间隔自身重复的动作,例如由吉他弦或儿童在秋千上摆动所表现出的动作。 在本节中,我们将研究振荡的基本特征及其数学描述。

振荡周期和频率
在没有摩擦的情况下,完成一次振荡的时间保持不变,称为周期 (T)。 它的单位通常是秒,但可以是任何方便的时间单位。 “周期” 一词是指某个事件的时间,无论是否重复,但在本章中,我们将主要讨论周期性运动,顾名思义,周期运动是重复的。
与周期密切相关的概念是事件的频率。 频率 (f) 定义为每单位时间的事件数。 对于周期性运动,频率是每单位时间的振荡次数。 频率和周期之间的关系是
\[f = \frac{1}{T} \ldotp \label{15.1}\]
频率的 SI 单位是赫兹 (Hz),定义为每秒一个周期:
\[1\; Hz = 1\; cycle/sec\; or\; 1\; Hz = \frac{1}{s} = 1\; s^{-1} \ldotp\]
一个周期就是一次完整的振荡
医疗专业人员使用超声波机器制作用于检查人体内脏器官的图像。 超声波机器发出高频声波,这些声波会从器官上反射,计算机接收波浪,用它们来创建画面。 我们可以根据我们对振荡的了解,使用本模块中提供的公式来确定频率。 以医学成像设备为例,它通过振荡产生超声波的周期为0.400\(\mu\) 秒。这种振荡的频率是多少?
策略
给出了周期 (T),并要求我们找出频率 (f)。
解决方案
用 0.400 µs 代替 f 中的 T =\(\frac{1}{T}\):
\[f = \frac{1}{T} = \frac{1}{0.400 \times 10^{-6}\; s} \ldotp \nonumber\]
求解后找到
\[f = 2.50 \times 10^{6}\; Hz \ldotp \nonumber\]
意义
这种声音频率远高于人类能听到的最高频率(人类听觉范围为 20 Hz 到 20,000 Hz);因此,它被称为超声波。 该频率下的适当振荡会生成用于非侵入性医学诊断的超声波,例如观察子宫内的胎儿。
简单谐波运动的特征
一种非常常见的周期运动称为简单谐波运动 (SHM)。 使用 SHM 振荡的系统称为简单的谐波振荡器。
在简单的谐波运动中,系统的加速度以及净力与位移成正比,作用方向与位移相反。
SHM 的一个很好的例子是将质量\(m\)附着在无摩擦表面上的弹簧上的物体,如图所示\(\PageIndex{2}\)。 物体围绕平衡位置振荡,物体上的净力等于弹簧提供的力。 如前一章所述,这种力量服从胡克定律 F s = −kx。
如果净力可以用胡克定律来描述并且没有阻尼(由于摩擦或其他非保守力而减速),那么一个简单的谐波振荡器在平衡位置的两侧都会以相等的位移振荡,如图中弹簧上的物体所示\(\PageIndex{2}\)。 平衡的最大位移称为振幅 (A)。 振幅和位移的单位相同,但取决于振荡的类型。 对于弹簧上的物体,振幅和位移的单位是米。
SHM 有何重要意义? 首先,简单谐波振荡器的周期\(T\)和频率\(f\)与振幅无关。 例如,无论是轻弹还是用力弹吉他的琴弦都会以相同的频率振荡。
两个重要因素确实会影响简单谐波振荡器的周期。 这段时间与系统的僵硬程度有关。 非常坚硬的物体具有较大的力常数 (k),这会使系统的周期变短。 例如,你可以调整跳水板的刚度——它越硬,振动越快,周期越短。 周期还取决于振荡系统的质量。 系统规模越大,时间越长。 例如,跳水板上的沉重人物上下弹跳的速度比轻的人慢。 实际上,质量 m 和力常数 k 是影响 SHM 周期和频率的唯一因素。 要得出周期和频率的方程,我们必须首先定义和分析运动方程。 请注意,力常数有时被称为弹簧常数。
SHM 的方程
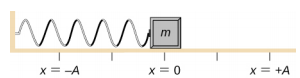
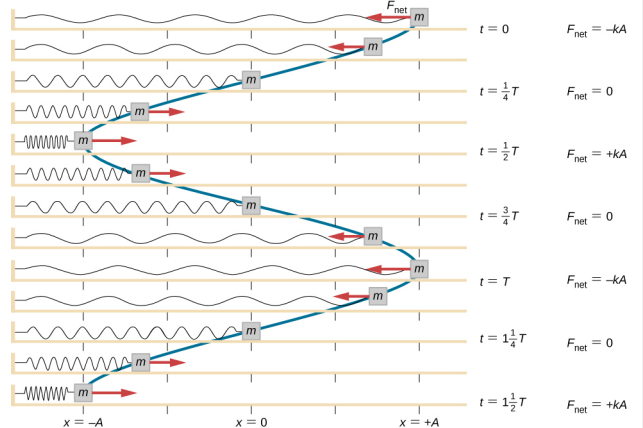
假设在无摩擦工作台上的弹簧上安装了一个方块(图\(\PageIndex{3}\))。 平衡位置(弹簧既未拉伸也未压缩的位置)标记为 x = 0。 在平衡位置,净力为零。
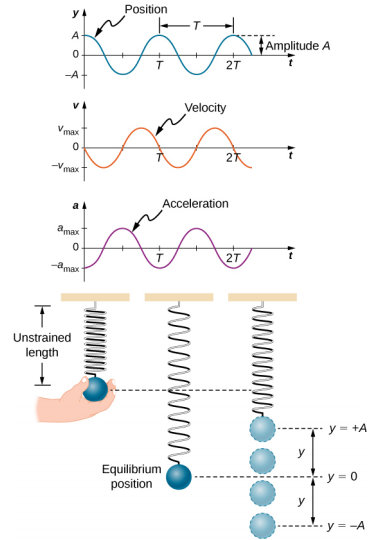
在方块上完成工作,将其拉到 x = + A 的位置,然后将其从静止状态中释放。 最大 x 位置 (A) 称为运动振幅。 方块开始在 SHM 中在 x = + A 和 x = −A 之间振荡,其中 A 是运动的振幅,T 是振荡周期。 周期是指一次振荡的时间。 图中\(\PageIndex{4}\)显示了方块在释放后完成一次半振荡时的运动。
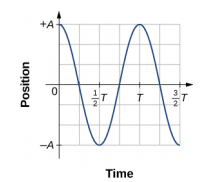
该图\(\PageIndex{4}\)显示了区块位置随时间变化的曲线。 当绘制位置随时间变化时,很明显,数据可以通过具有振幅\(A\)和周期的余弦函数进行建模\(T\)。 余弦函数 cos 每隔 2 的倍数\(\theta\)重复一次\(\pi\),而方块的运动每一个周期 T 重复一次。但是,该函数\(\cos \left(\dfrac{2 \pi}{T} t \right)\)重复周期的每一个整数倍数。 余弦函数的最大值为一,因此必须将余弦函数乘以振幅 A。
\[x(t) = A \cos \left(\dfrac{2 \pi}{T} t \right) = A \cos (\omega t) \ldotp \label{15.2}\]
回想一下关于旋转的章节,角频率等于\(\omega = \frac{d \theta}{dt}\)。 在这种情况下,周期是恒定的,因此角频率定义为 2\(\pi\) 除以周期\(\omega = \frac{2 \pi}{T}\)。
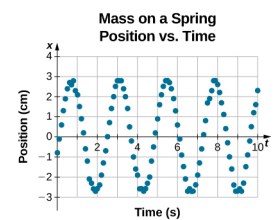
将位置作为时间函数的方程\(x(t) = A\cos( \omega t)\)适用于建模数据,其中模块在初始时间 t = 0.00 s 的位置位于振幅 A 处,初始速度为零。 在获取实验数据时,质量在初始时间 t = 0.00 s 的位置通常不等于振幅,初始速度也不为零。 以学生在实验室中收集的 10 秒数据为例,如图所示\(\PageIndex{6}\)。
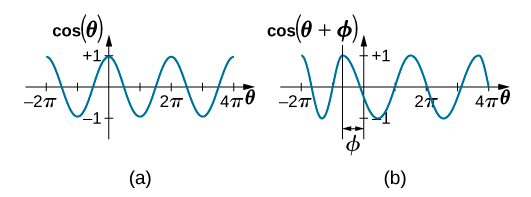
图中的数据仍然\(\PageIndex{6}\)可以使用周期函数(如余弦函数)建模,但函数向右移动。 这种转变被称为相移,通常用希腊字母 phi (\(\phi\)) 表示。 弹簧上方块的位置随时间变化的方程变成
\[x(t) = A \cos (\omega t + \phi) \ldotp\]
这是 SHM 的广义方程,其中 t 是以秒为单位测量的时间,\(\omega\)是以反秒为单位的角频率,A 是以米或厘米为单位测量的振幅,\(\phi\)是以弧度为单位测量的相移(图\(\PageIndex{7}\))。 应该注意的是,由于正弦函数和余弦函数的差异仅在于相移,因此可以使用余弦或正弦函数对这个运动进行建模。
弹簧上质量在 SHM 中振荡的速度可以通过取位置方程的导数得出:
\[v(t) = \frac{dx}{dt} = \frac{d}{dt} (A \cos (\omega t + \phi)) = -A \omega \sin(\omega t + \varphi) = -v_{max} \sin (\omega t + \phi) \ldotp\]
由于正弦函数在 —1 和 +1 之间振荡,因此最大速度是振幅乘以角频率,v max = A\(\omega\)。 当质量向 x = + A 移动时,最大速度出现在平衡位置 (x = 0),当质量向 x = −A 移动时,负方向的最大速度是在平衡位置 (x = 0) 达到的,等于 −v ma x。
弹簧上质量的加速度可以通过取速度的时间导数得出:
\[a(t) = \frac{dv}{dt} = \frac{d}{dt} (-A \omega \sin (\omega t + \phi)) = -A \omega^{2} \cos (\omega t + \varphi) = -a_{max} \cos (\omega t + \phi) \ldotp\]
最大加速度为 a max = A\(\omega^{2}\)。 最大加速度出现在位置 (x = −A),加速度出现在位置 (x = −A),等于 −a max。
SHM 运动方程摘要
总而言之,弹簧上方块的振荡运动可以使用以下运动方程进行建模:
\[ \begin{align} x(t) &= A \cos (\omega t + \phi) \label{15.3} \\[4pt] v(t) &= -v_{max} \sin (\omega t + \phi) \label{15.4} \\[4pt] a(t) &= -a_{max} \cos (\omega t + \phi) \label{15.5} \end{align}\]
和
\[ \begin{align} x_{max} &= A \label{15.6} \\[4pt] v_{max} &= A \omega \label{15.7} \\[4pt] a_{max} &= A \omega^{2} \ldotp \label{15.8} \end{align}\]
这里\(A\)是运动的振幅,\(T\)是周期,\(\phi\)是相移,\(\omega = \frac{2 \pi}{T}\)= 2\(\pi\) f 是方块运动的角频率。
在无摩擦的表面上放置一个 2.00 千克的方块。 力常数为 k = 32.00 N/m 的弹簧连接到方块上,弹簧的另一端连接到墙上。 弹簧可以压缩或延伸。 平衡位置标记为 x = 0.00 m。在方块上完成工作,将其拉出 x = + 0.02 m。方块从静止状态中释放出来,在 x = + 0.02 m 和 x = −0.02 m 之间振荡。运动周期为 1.57 秒。确定运动方程。
策略
我们首先找到角频率。 相移为零,\(\phi\)= 0.00 rad,因为方块在 x = A = + 0.02 m 处从静止状态中释放。一旦找到角频率,我们就可以确定最大速度和最大加速度。
解决方案
可以找到角频率并将其用于查找最大速度和最大加速度:
\[\begin{split} \omega & = \frac{2 \pi}{1.57\; s} = 4.00\; s^{-1}; \\ v_{max} & = A \omega = (0.02\; m)(4.00\; s^{-1}) = 0.08\; m/s; \\ a_{max} & = A \omega^{2} = (0.02; m)(4.00\; s^{-1})^{2} = 0.32\; m/s^{2} \ldotp \end{split}\]
剩下的就是填写运动方程式:
\[\begin{split} x(t) & = a \cos (\omega t + \phi) = (0.02\; m) \cos (4.00\; s^{-1} t); \\ v(t) & = -v_{max} \sin (\omega t + \phi) = (-0.8\; m/s) \sin (4.00\; s^{-1} t); \\ a(t) & = -a_{max} \cos (\omega t + \phi) = (-0.32\; m/s^{2}) \cos (4.00\; s^{-1} t) \ldotp \end{split}\]
意义
可以随时找到位置、速度和加速度。 请务必记住,在使用这些方程时,您的计算器必须处于弧度模式。
弹簧上弥撒的周期和频率
附着在弹簧上的物体的 SHM 的一个有趣特征是,角频率以及运动的周期和频率仅取决于质量和力常数,而不取决于其他因素,例如运动的振幅。 我们可以使用运动方程和牛顿第二定律 (\(\vec{F}_{net} = m \vec{a}\)) 来找到角频率、频率和周期的方程。
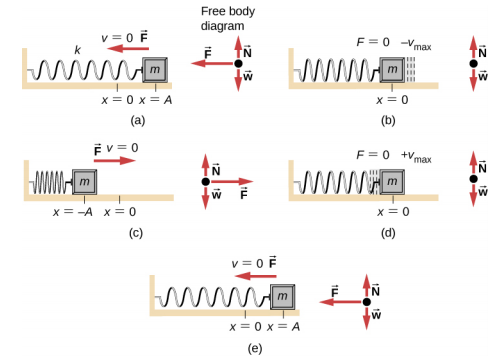
以无摩擦表面上的弹簧上的方块为例。 质量上有三种力:重量、法向力和弹簧产生的力。 仅有的两种垂直于表面起作用的力是重量和法向力,它们的幅度相等,方向相反,因此总和为零。 与表面平行起作用的唯一力是弹簧产生的力,因此净力必须等于弹簧的力:
\[\begin{split} F_{x} & = -kx; \\ ma & = -kx; \\ m \frac{d^{2} x}{dt^{2}} & = -kx; \\ \frac{d^{2} x}{dt^{2}} & = - \frac{k}{m} x \ldotp \end{split}\]
用运动方程代替 x 和 a 可以得到
\[-A \omega^{2} \cos (\omega t + \phi) = - \frac{k}{m} A \cos (\omega t +\phi) \ldotp\]
取消类似的项并求解角频率会产生
\[\omega = \sqrt{\frac{k}{m}} \ldotp \label{15.9}\]
角频率仅取决于力常数和质量,而不取决于振幅。 角频率定义为\(\omega = \frac{2 \pi}{T}\),这会生成运动周期的方程:
\[T = 2 \pi \sqrt{\frac{m}{k}} \ldotp \label{15.10}\]
周期也仅取决于质量和力常数。 质量越大,周期越长。 弹簧越硬,周期越短。 频率是
\[f = \frac{1}{T} = \frac{1}{2 \pi} \sqrt{\frac{k}{m}} \ldotp \label{15.11}\]
垂直运动和水平弹簧
当弹簧垂直悬挂并连接方块并启动时,方块会在 SHM 中振荡。 在这种情况下,没有法向力,重力的净效果是改变平衡位置。 以图为例\(\PageIndex{8}\)。 两种力作用在方块上:弹簧的重量和力。 重量是恒定的,弹簧的力会随着弹簧长度的变化而变化。
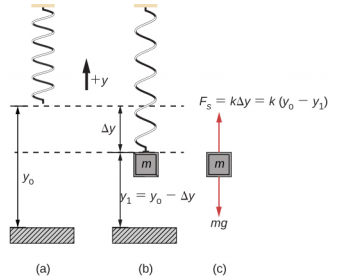
当方块到达平衡位置时,如图所示\(\PageIndex{8}\),弹簧的力等于方块的重量,F net = F s − mg = 0,其中
\[-k (- \Delta y) = mg \ldotp\]
从图中可以看出,位置的变化是\( \Delta y = y_{0}-y_{1} \),从那以后\(-k (- \Delta y) = mg\),我们有
\[k (y_{0} - y_{1}) - mg = 0 \ldotp\]
如果方块被移位并被释放,它将围绕新的平衡位置振荡。 如图所示\(\PageIndex{9}\),如果将方块的位置记录为时间函数,则记录为周期性函数。 如果方块移至 y 位置,则净力变为 F net = k (y 0-y) − mg。 但是我们发现,在平衡位置,mg = k\(\Delta\) y = ky 0 − ky 1。 用方程中的权重代替得到
\[F_{net} =ky_{0} - ky - (ky_{0} - ky_{1}) = k (y_{1} - y) \ldotp\]
回想一下,y 1 只是平衡位置,任何位置都可以设置为点 y = 0.00 m。因此,让我们将 y 1 设置为 y = 0.00 m。然后净力变为
\[\begin{split}F_{net} & = -ky; \\ m \frac{d^{2} y}{dt^{2}} & = -ky \ldotp \end{split}\]
这正是我们之前发现的弹簧上水平滑动质量的情况。 恒定的重力只能用来改变质量的平衡位置。 因此,解的形式应与水平弹簧上的方块相同,y (t) = Acos (\(\omega\)t +\(\phi\))。 速度和加速度方程的形式也与水平情况的方程相同。 请注意,包含相移意味着实际上可以使用余弦函数或正弦函数对运动进行建模,因为这两个函数的区别仅在于相移。