
10.2: Kinematics ya Mwendo wa Mzunguko
- Page ID
- 183778

Malengo ya kujifunza
Mwishoni mwa sehemu hii, utaweza:
- Angalia kinematics ya mwendo wa mzunguko.
- Pata equations ya kinematic ya mzunguko.
- Tathmini mikakati ya kutatua tatizo kwa kinematics ya mzunguko.
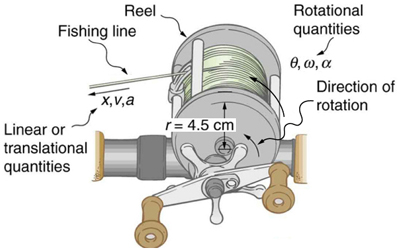
Tu kwa kutumia intuition yetu, tunaweza kuanza kuona jinsi wingi wa mzunguko kama\(\theta, \omega\) na\(\alpha\) ni kuhusiana na mtu mwingine. Kwa mfano, kama gurudumu la pikipiki lina kasi kubwa ya angular kwa muda mrefu, inaishia kugeuka haraka na inazunguka kupitia mapinduzi mengi. Kwa maneno zaidi ya kiufundi, ikiwa kasi ya angular ya gurudumu\(\alpha\) ni kubwa kwa muda mrefu,\(t\) basi kasi ya mwisho ya angular\(\omega\) na angle ya mzunguko\(\theta\) ni kubwa. Mwendo wa mzunguko wa gurudumu ni sawa na ukweli kwamba kasi kubwa ya kutafsiri ya pikipiki inazalisha kasi kubwa ya mwisho, na umbali uliosafiri pia utakuwa mkubwa. Kinematics ni maelezo ya mwendo. Kinematics ya mwendo wa mzunguko inaelezea mahusiano kati ya angle ya mzunguko, kasi ya angular, kasi ya angular, na wakati. Hebu tuanze kwa kutafuta equation zinazohusiana\(\omega, \alpha\), na\(t\). Kuamua equation hii, sisi kukumbuka ukoo kinematic equation kwa tafsiri, au moja kwa moja-line, mwendo:\[v = v_0 + at \, (constant \, a)\] Kumbuka kwamba katika mwendo wa mzunguko\(a = a_t\), na sisi kutumia ishara\(a\) kwa tangential au linear kuongeza kasi tangu sasa. Kama ilivyo katika kinematics linear, tunadhani\(a\) ni mara kwa mara, ambayo ina maana kwamba kasi ya angular pia\(\alpha\) ni mara kwa mara, kwa sababu\(a = r\alpha\). Sasa, hebu mbadala\(v = r\omega\) na\(a = r\alpha\) katika equation linear hapo juu:
\[rw = r\omega_o + r\alpha t,\]
Radi\(r\) inafuta katika equation, ikitoa\[\omega = \omega_o + at \, (constant \, a),\]\(\omega_o\) wapi kasi ya angular ya awali. Equation hii ya mwisho ni uhusiano wa kinematic kati\(\omega, \alpha\), na\(t\) - yaani, inaelezea uhusiano wao bila kutaja nguvu au raia ambayo inaweza kuathiri mzunguko. Pia ni sawa sawa na fomu kwa mwenzake wa kutafsiri.
Kufanya Connections.
Kinematics kwa mwendo wa mzunguko ni sawa kabisa na kinematics ya kutafsiri, kwanza iliyotolewa katika Kinematics One-Dimensional. Kinematiki inahusika na maelezo ya mwendo bila kujali nguvu au wingi. Tutaona kwamba kiasi cha kutafsiri kinematic, kama vile uhamisho, kasi, na kuongeza kasi zina vielelezo vya moja kwa moja katika mwendo wa mzunguko.
Kuanzia na milinganyo minne ya kinematic tuliyoendeleza katika Kinematiki ya One-Dimensional, tunaweza kupata milinganyo minne ya mzunguko wa kinematic (iliyotolewa pamoja na wenzao wa kutafsiri):
| Mzunguko | Tafsiri | |
|---|---|---|
| \(\theta = \overline{\omega} t\) | \(x = \overline{v}t\) | |
| \(\omega = \omega_o + \alpha t\) | \(v = v_o +at\) | \((constant \, \alpha, a)\) |
| \(\Theta = \omega_ot + \frac{1}{2}\alpha t^2\) | \(x = v_0t + \frac{1}{2}at^2\) | \((constant \, \alpha, a)\) |
| \(\omega^2 = \omega_o^2 + 2\alpha \theta\) | \(v^2 = v_0^2 + 2 ax\) | \((constant \, \alpha, a)\) |
Katika equations hizi, usajili 0 inaashiria maadili ya awali (\(\theta_0, x_0\)na\(t_0\) ni maadili ya awali), na kasi ya angular wastani\(overline{\omega}\) na kasi ya wastani\(\overline{v}\) hufafanuliwa kama ifuatavyo:
\[\overline{\omega} = \dfrac{\omega_0 + \omega}{2} \, and \, \overline{v} = \dfrac{v_0 + v}{2}.\]
Ulinganisho uliotolewa hapo juu katika Jedwali\(\PageIndex{1}\) unaweza kutumika kutatua tatizo lolote la kinematiki la mzunguko au la kutafsiri ambalo\(a\) na\(\alpha\) ni mara kwa mara.
Mkakati wa Kutatua matatizo kwa Kinematiki za Mzunguko
- Kuchunguza hali ili kuamua kwamba kinematics ya mzunguko (mwendo wa mzunguko) inahusika. Mzunguko lazima uhusishwe, lakini bila ya haja ya kuzingatia nguvu au raia zinazoathiri mwendo.
- Tambua hasa kile kinachohitajika kuamua katika tatizo (kutambua haijulikani). Mchoro wa hali hiyo ni muhimu.
- Fanya orodha ya kile kinachopewa au kinaweza kuhitimishwa kutokana na tatizo kama ilivyoelezwa (kutambua maarifa).
- Tatua equation sahihi au equations kwa wingi kuamua (haijulikani). Inaweza kuwa na manufaa kufikiri kwa suala la analog ya kutafsiri kwa sababu kwa sasa unajua na mwendo huo.
- Badilisha maadili inayojulikana pamoja na vitengo vyao katika equation sahihi, na kupata ufumbuzi namba kamili na vitengo. Hakikisha kutumia vitengo vya radians kwa pembe.
- Angalia jibu lako ili uone ikiwa ni busara: Je, jibu lako lina maana?
Mfano\(\PageIndex{1}\): Calculating the Acceleration of a Fishing Reel
Mvuvi wa kina wa baharini ndoano samaki wakubwa ambao huogelea mbali na mashua akiunganisha mstari wa uvuvi kutoka kwenye reel yake ya uvuvi. Mfumo wote ni wa awali unapumzika na mstari wa uvuvi unasimama kutoka kwenye reel kwenye eneo la 4.50 cm kutoka kwa mzunguko wake wa mzunguko. Reel inapewa kasi ya angular ya\(110 \, rad/s^2\) kwa 2.00 s kama inavyoonekana katika Kielelezo 10.3.1.
- Je, ni kasi ya mwisho ya angular ya reel?
- Kwa kasi gani ni mstari wa uvuvi ukiacha reel baada ya 2.00 s inapita?
- Je, reel hufanya mapinduzi ngapi?
- Ni mita ngapi za mstari wa uvuvi hutoka kwenye reel wakati huu?
Mkakati
Katika kila sehemu ya mfano huu, mkakati huo ni sawa na ulikuwa wa kutatua matatizo katika kinematics linear. Hasa, maadili yanayojulikana yanatambuliwa na uhusiano hutafutwa ambao unaweza kutumika kutatua kwa wasiojulikana.
Suluhisho kwa (a)
Hapa\(\alpha\) na\(t\) hutolewa na\(\omega\) inahitaji kuamua. Equation moja kwa moja kutumia ni\(\omega = \omega_0 + \alpha t\) kwa sababu haijulikani tayari upande mmoja na maneno mengine yote yanajulikana. Equation hiyo inasema kwamba
\[\omega = \omega_0 + \alpha t.\]
Sisi pia kutokana na kwamba\(\omega_0 = 0\) (huanza kutoka kupumzika), ili
\[\omega = 0 + (110 \, rad/s^2)(2.00s) = 220 \, rad/s.\]
Suluhisho kwa (b)
Sasa hiyo\(\omega\) inajulikana, kasi\(v\) inaweza kupatikana kwa urahisi kwa kutumia uhusiano\[v = r\omega,\] ambapo radius\(r\) ya reel inapewa kuwa 4.50 cm; hivyo,\[ v = (0.0450 \, m)(220 \, rad/s) = 9.90 \, m/s.\] Kumbuka tena kwamba radians lazima daima kutumika katika hesabu yoyote inayohusiana kiasi linear na angular. Pia, kwa sababu radians ni dimensionless, tuna\(m \times rad = m\).
Suluhisho kwa (c)
Hapa, tunaulizwa kupata idadi ya mapinduzi. Kwa sababu\(1\space rev = 2\pi \, rad\), tunaweza kupata idadi ya mapinduzi kwa kutafuta\(\theta\) katika radians. Tunapewa\(\alpha\) na\(t\), na tunajua\(\omega_o\) ni sifuri, ili\(\theta\) iweze kupatikana kwa kutumia\(\theta = \omega_0t + \frac{1}{2}\alpha t^2\).
\[\theta = \omega_0t + \dfrac{1}{2} \alpha t^2\]
\[= 0 + (0.500)(110 \, rad/s^2)(2.00s)^2 = 220 rad.\]
Kubadili radians kwa mapinduzi kunatoa\[\theta = (220 \, rad)\dfrac{1 \, rev}{2\pi \, rad} = 35.0 \, rev.\]
Suluhisho kwa (d)
Idadi ya mita za mstari wa uvuvi ni\(x\) ambayo inaweza kupatikana kupitia uhusiano wake na\(\theta\).
\[x = r\theta = (0.0450 \, m)(220 \, rad) = 9.90 \, m.\]
Majadiliano
Mfano huu unaonyesha kwamba uhusiano kati ya wingi wa mzunguko ni sawa na wale kati ya wingi linear. Pia tunaona katika mfano huu jinsi kiasi cha mstari na mzunguko kinaunganishwa. Majibu ya maswali ni ya kweli. Baada ya kufungua kwa sekunde mbili, reel inapatikana kwa spin saa 220 rad/s, ambayo ni 2100 rpm. (Hakuna reels ajabu wakati mwingine kufanya sauti high-akapiga.) Kiasi cha mstari wa uvuvi kilichochezwa ni 9.90 m, kuhusu haki ya wakati samaki kubwa hupiga.
Mfano\(\PageIndex{2}\): Calculating the Duration When the Fishing Reel Slows Down and Stops
Sasa hebu fikiria nini kinatokea kama mvuvi inatumika kuvunja kwa reel inazunguka, kufikia kuongeza kasi angular ya -\(300 \, rad/s^2\). Muda gani kuchukua reel kuja kuacha?
Mkakati
Tunaulizwa kupata muda wa reel kuja kuacha. Hali ya awali na ya mwisho ni tofauti na yale yaliyo katika tatizo la awali, ambalo lilihusisha reel sawa ya uvuvi. Sasa tunaona kwamba kasi ya awali ya angular ni\(\omega_0 = 220 \, rad/s\) na kasi ya mwisho ya angular\(\omega\) ni sifuri. Kasi ya angular inapewa kuwa\(\alpha = - 300 \, rad/s^2.\) Kuchunguza milinganyo inapatikana, tunaona wingi wote lakini t wanajulikana katika\(\omega = \omega_0 + \alpha t\), na kuifanya iwe rahisi kutumia equation hii.
Suluhisho
Majimbo ya equation\[\omega = \omega_0 + \alpha t.\]
Sisi kutatua equation algebraically kwa t, na kisha mbadala maadili inayojulikana kama kawaida, kujitoa
\[t = \dfrac{\omega - \omega_0}{\alpha} = \dfrac{0 - 220 \, rad/s}{-300 \, rad/s^2} = 0.733 \, s.\]
Majadiliano
Kumbuka kuwa utunzaji lazima uchukuliwe na ishara zinazoonyesha maelekezo ya kiasi mbalimbali. Pia, kumbuka kuwa wakati wa kuacha reel ni ndogo sana kwa sababu kasi ni kubwa sana. Uvuvi mistari wakati mwingine snap kwa sababu ya accelerations kushiriki, na wavuvi mara nyingi basi samaki kuogelea kwa muda kabla ya kutumia breki juu ya reel. Samaki amechoka itakuwa polepole, inahitaji kasi ndogo.
Mfano\(\PageIndex{3}\): Calculating the Slow Acceleration of Trains and Their Wheels
Treni kubwa za mizigo huzidisha polepole sana. Tuseme moja treni hiyo inaharakisha kutoka kupumzika, kutoa magurudumu yake ya 0.350-m-radius kuongeza kasi ya angular ya\(0.250 \, rad/s^2\). Baada ya magurudumu kuwa alifanya 200 mapinduzi (kudhani hakuna slippage): (a) Jinsi mbali ina treni wakiongozwa chini ya kufuatilia? (b) Je! Ni kasi ya mwisho ya angular ya magurudumu na kasi ya mstari wa treni?
Mkakati
Katika sehemu (a), tunaulizwa kupata\(x\), na katika (b) tunaulizwa kupata\(\omega\) na\(v\). Tunapewa idadi ya mapinduzi\(\theta\), radius ya magurudumu\(r\), na kasi ya angular\(\alpha\).
Suluhisho kwa (a)
Umbali\(x\) unapatikana kwa urahisi kutokana na uhusiano kati ya umbali na angle ya mzunguko:
\[\theta = \dfrac{x}{r}.\]
Kutatua equation hii kwa\(x\) mavuno\[x = r\theta.\]
Kabla ya kutumia equation hii, lazima tubadilishe idadi ya mapinduzi kuwa radians, kwa sababu tunashughulika na uhusiano kati ya kiasi cha mstari na mzunguko:
\[\theta = (200 \, rev)\dfrac{2\pi \, rad}{1 \, rev} = 1257 \, rad.\]
Sasa tunaweza kubadilisha maadili inayojulikana katika\(x = r\theta\) kupata umbali treni wakiongozwa chini ya kufuatilia:
\[x = r\theta = (0.350 \, m)(1257 \, rad) = 440 \, m.\]
Suluhisho kwa (b)
Hatuwezi kutumia equation yoyote kwamba\(t\) inashirikisha kupata\(\omega\), kwa sababu equation ingekuwa angalau mbili maadili haijulikani. equation\(\omega^2 = \omega_0^2 + 2\alpha \theta\) itafanya kazi, kwa sababu tunajua maadili kwa vigezo vyote isipokuwa\(\omega\).
\[\omega^2 = \omega_0^2 + 2 \alpha \theta\]
Kuchukua mizizi mraba wa equation hii na kuingia maadili inayojulikana anatoa
\[\omega = [0 + 2(0.250 \, rad/s^2)(1257 \, rad)]^{1/2}\]
\[= 25.1 \, rad/s.\]
Tunaweza kupata kasi ya mstari wa treni\(v\), kupitia uhusiano wake na\(\omega\):
\[v = r\omega = (0.350 \, m)(25.1 \, rad/s) = 8.77 \, m/s.\]
Majadiliano
Umbali uliosafiri ni mkubwa sana na kasi ya mwisho ni polepole (chini ya 32 km/h).
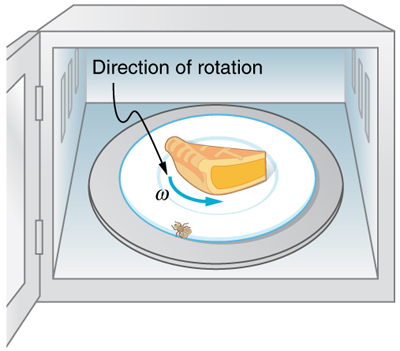
Kuna translational mwendo hata kwa kitu inazunguka katika nafasi, kama mfano zifuatazo unaeleza. Kielelezo 10.3.2 inaonyesha kuruka kwenye makali ya sahani ya tanuri ya microwave inayozunguka. Mfano hapa chini huhesabu umbali wa jumla unaotembea.
Mfano\(\PageIndex{4}\): Calculating the Distance Traveled by a Fly on the Edge of a Microwave Oven Plate
Mtu anaamua kutumia tanuri ya microwave ili kurejesha chakula cha mchana. Katika mchakato, kuruka kwa ajali huingia ndani ya microwave na ardhi kwenye makali ya nje ya sahani inayozunguka na inabaki pale. Ikiwa sahani ina radius ya 0.15 m na inazunguka saa 6.0 rpm, uhesabu umbali wa jumla uliosafiri na kuruka wakati wa kupikia 2.0-min. (Puuza nyakati za kuanza na za polepole.)
Mkakati
Kwanza, pata idadi ya mapinduzi\(\theta\), na kisha umbali wa mstari\(x\) ulisafiri. \(\theta = \overline{\omega}\)inaweza kutumika kupata kwa\(\theta\) sababu\(\overline{\omega}\) inapewa kuwa 6.0 rpm.
Suluhisho
Kuingia maadili inayojulikana katika\(\theta = \overline{\omega}\) inatoa\[\theta = \overline{\omega} = (6.0 \, rpm)(2.0 \, min) = 12 \, rev.\]
Kama siku zote, ni muhimu kubadili mapinduzi kwa radians kabla ya kuhesabu kiasi cha mstari kama\(x\) kutoka kwa kiasi cha angular kama\(\theta\):
\[\theta = (12 \, rev)\left(\dfrac{2\pi \, rad}{1 \, rev}\right) = 75.4 \, rad.\]
Sasa, kwa kutumia uhusiano kati\(x\) na\(\theta\), tunaweza kuamua umbali uliosafiri:
\[x = r\theta = (0.15 \, m)(75.4 \, rad) = 11 \, m.\]
Majadiliano
Safari kabisa (ikiwa inaendelea)! Kumbuka kuwa umbali huu ni umbali wa jumla uliosafiri na kuruka. Uhamisho ni kweli sifuri kwa mapinduzi kamili kwa sababu huleta kuruka kwenye nafasi yake ya awali. Tofauti kati ya umbali wa jumla uliosafiri na uhamisho ulibainishwa kwanza katika Kinematiki ya One-Dimensional.
Zoezi\(\PageIndex{1}\)
Kinematics ya mzunguko ina mahusiano mengi muhimu, mara nyingi huonyeshwa kwa fomu ya equation. Je, sheria hizi za mahusiano ya fizikia au zinaelezea tu? (Kidokezo: swali lile linatumika kwa kinematics linear.)
- Jibu
-
Kinematics ya mzunguko (kama vile kinematics linear) inaelezea na haiwakilishi sheria za asili. Kwa kinematiki, tunaweza kuelezea mambo mengi kwa usahihi mkubwa lakini kinematiki hazizingatii sababu. Kwa mfano, kasi kubwa ya angular inaelezea mabadiliko ya haraka sana katika kasi ya angular bila kuzingatia sababu yake.
Muhtasari
- Kinematics ni maelezo ya mwendo.
- Kinematics ya mwendo wa mzunguko inaelezea mahusiano kati ya angle ya mzunguko, kasi ya angular, kasi ya angular, na wakati.
- Kuanzia na equations nne kinematic sisi maendeleo katika Kinematics One-Dimensional, tunaweza kupata nne rotational kinematic equations (iliyotolewa pamoja na wenzao translational) kuonekana katika Jedwali.
- Katika equations hizi, subscript 0 inaashiria maadili ya awali\(({x_0}\) na\(t_o\) ni maadili ya awali), na kasi ya angular wastani\(\overline{\omega}\) na kasi ya wastani\(\overline{v}\) hufafanuliwa kama ifuatavyo:\[ \overline{\omega} = \dfrac{\omega_0 + \omega}{2} \, and \, \dfrac{v_0 + v}{2}.\]
faharasa
- kinematics ya mwendo wa mzunguko
- inaelezea mahusiano kati ya angle ya mzunguko, kasi ya angular, kasi ya angular, na wakati