
9.2: Hali ya Pili ya Msawazo
- Page ID
- 183818

Malengo ya kujifunza
Mwishoni mwa sehemu hii, utaweza:
- Weka hali ya pili ambayo ni muhimu kufikia usawa.
- Eleza wakati na mambo ambayo inategemea.
- Eleza jukumu la wakati katika mechanics ya mzunguko.
Ufafanuzi: Torque
Hali ya pili muhimu ili kufikia usawa inahusisha kuepuka mzunguko wa kasi (kudumisha kasi ya angular mara kwa mara). Mwili unaozunguka au mfumo unaweza kuwa katika usawa ikiwa kiwango chake cha mzunguko ni mara kwa mara na bado hazibadilishwa na nguvu zinazofanya juu yake. Ili kuelewa ni mambo gani yanayoathiri mzunguko, hebu fikiria juu ya kile kinachotokea unapofungua mlango wa kawaida kwa kugeuka kwenye vidole vyake.
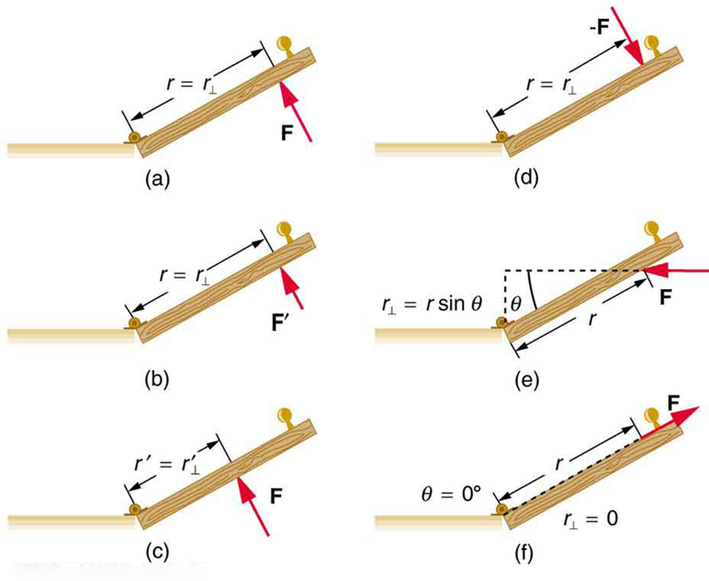
Sababu kadhaa za kawaida huamua jinsi unavyofaa katika kufungua mlango (Kielelezo\(\PageIndex{1}\)). Kwanza kabisa, nguvu kubwa, inafaa zaidi katika kufungua mlango-wazi, vigumu kushinikiza, haraka mlango unafungua. Pia, hatua ambayo wewe kushinikiza ni muhimu. Ikiwa unatumia nguvu yako karibu sana na vidole, mlango utafungua polepole, ikiwa ni sawa. Watu wengi wamekuwa na aibu kwa kufanya kosa hili na kupigana dhidi ya mlango wakati haukufungua haraka kama inavyotarajiwa. Hatimaye, mwelekeo ambao unashinikiza pia ni muhimu. Mwelekeo bora zaidi ni perpendicular kwa mlango-sisi kushinikiza katika mwelekeo huu karibu instinctively.
Ukubwa, mwelekeo, na hatua ya matumizi ya nguvu huingizwa katika ufafanuzi wa wingi wa kimwili unaoitwa wakati. Torque ni sawa na mzunguko wa nguvu. Ni kipimo cha ufanisi wa nguvu katika kubadilisha au kuharakisha mzunguko (kubadilisha kasi ya angular kwa kipindi cha muda). Katika fomu ya equation, ukubwa wa moment hufafanuliwa kuwa
\[\tau = rF\, \sin \, \theta\]
ambapo\(\tau\) (barua ya Kigiriki tau) ni ishara ya moment,\(r\) ni umbali kutoka hatua ya egemeo hadi mahali ambapo nguvu hutumiwa,\(F\) ni ukubwa wa nguvu, na\(\theta\) ni angle kati ya nguvu na vector iliyoongozwa kutoka hatua ya maombi kwa egemeo uhakika, kama inavyoonekana katika Takwimu\(\PageIndex{1}\) na\(\PageIndex{2}\).
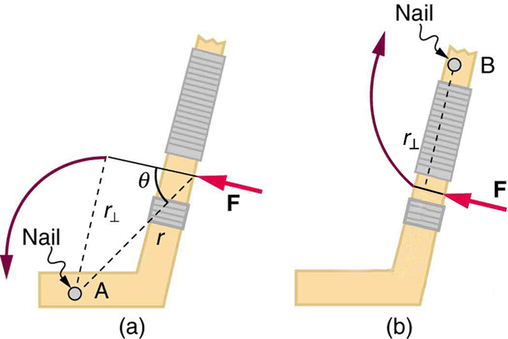
kujieleza mbadala kwa moment ni kutolewa katika suala la mkono perpendicular lever\(r_{\perp}\) kama inavyoonekana katika Takwimu\(\PageIndex{1}\) na\(\PageIndex{2}\), ambayo hufafanuliwa kama
\[r_{\perp} = r \, \sin \, \theta\]
ili
\[\tau = r_{\perp}F.\]
mkono perpendicular lever\(r_{\perp}\) ni umbali mfupi kutoka pivot uhakika kwa line pamoja ambayo\(F\) vitendo; ni umeonyesha kama mstari dashed katika Takwimu\(\PageIndex{1}\) na\(\PageIndex{2}\). Kumbuka kwamba sehemu ya mstari inayofafanua umbali\(r_{\perp}\) ni perpendicular kwa\(F\), kama jina lake linamaanisha. Wakati mwingine ni rahisi kupata au kutazama\(r_{\perp}\) kuliko kupata wote\(r\) na\(\theta\). Katika hali hiyo, inaweza kuwa rahisi zaidi kutumia\(\tau = r_{perp}F\) badala ya\(\tau = rF \, \sin \, \theta\) wakati, lakini wote wawili ni halali.
SI kitengo cha moment ni newtons mara mita, kawaida imeandikwa kama\(N \cdot m\). Kwa mfano, kama wewe kushinikiza perpendicular mlango na nguvu ya 40 N katika umbali wa 0.800 m kutoka bawaba, wewe exert moment ya\(32 \, N \cdot m(0.800 \, m \times 40 \, N \times sin \, 90^o)\) jamaa na bawaba. Ikiwa unapunguza nguvu hadi 20 N, wakati huo umepungua\(16 \, N \cdot m\), na kadhalika.
Moment daima ni mahesabu kwa kutaja baadhi ya pivot uhakika waliochaguliwa. Kwa nguvu hiyo iliyotumiwa, chaguo tofauti kwa eneo la egemeo litakupa thamani tofauti kwa wakati, tangu wote wawili\(r\) na\(\theta\) hutegemea eneo la egemeo. Hatua yoyote katika kitu chochote inaweza kuchaguliwa kuhesabu wakati kuhusu hatua hiyo. Kitu hakiwezi kweli pivot kuhusu “pivot point” iliyochaguliwa.
Kumbuka kuwa kwa mzunguko katika ndege, wakati una maelekezo mawili iwezekanavyo. Torque ni ama clockwise au kinyume chake jamaa na kuchaguliwa egemeo uhakika, kama inavyoonekana kwa pointi B na A, kwa mtiririko huo, katika Kielelezo\(\PageIndex{2}\). Kama kitu inaweza mzunguko juu ya hatua A, itakuwa mzunguko kinyume chake, ambayo ina maana kwamba moment kwa nguvu inavyoonekana kama kinyume na A. lakini kama kitu inaweza mzunguko juu ya hatua B, itakuwa mzunguko clockwise, ambayo ina maana moment kwa nguvu inavyoonekana ni clockwise jamaa na B. pia, ukubwa wa moment ni mkubwa wakati mkono wa lever ni mrefu.
Sasa, hali ya pili muhimu ili kufikia usawa ni kwamba wakati wa nje wa nje kwenye mfumo lazima uwe sifuri. Wakati wa nje ni moja ambayo imeundwa na nguvu ya nje. Unaweza kuchagua hatua ambayo wakati huo umehesabiwa. Hatua inaweza kuwa hatua ya kimwili ya mfumo au hatua nyingine yoyote katika nafasi-lakini lazima iwe hatua sawa kwa torques zote. Kama hali ya pili (wavu nje moment juu ya mfumo ni sifuri) ni kuridhika kwa uchaguzi mmoja wa egemeo uhakika, itakuwa pia kushikilia kweli kwa uchaguzi nyingine yoyote ya egemeo uhakika ndani au nje ya mfumo wa riba. (Hii ni kweli tu katika sura inertial ya kumbukumbu.) Hali ya pili muhimu ili kufikia usawa imeelezwa katika fomu ya equation kama
\[net \, \tau = 0\]
ambapo wavu maana jumla. Torques, ambazo ziko kinyume chake zinapewa ishara tofauti. mkataba wa kawaida ni kuwaita kinyume (ccw) torques chanya na clockwise (cw) torques hasi.
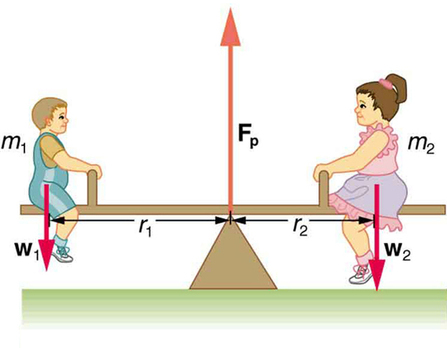
Wakati watoto wawili kusawazisha pembea kama inavyoonekana katika Kielelezo\(\PageIndex{3}\), wao kukidhi hali mbili kwa ajili ya usawa. Watu wengi wana intuition kamili kuhusu seesaws, kujua kwamba mtoto nyepesi lazima kukaa mbali zaidi na egemeo na kwamba mtoto nzito anaweza kuweka moja nyepesi mbali ya ardhi kwa muda usiojulikana.
Mfano\(\PageIndex{1}\): She Saw Torques On A Seesaw
watoto wawili inavyoonekana katika Kielelezo\(\PageIndex{3}\) ni uwiano juu ya mteremko wa molekuli kidogo. (Dhana hii inafanywa ili kuweka mfano rahisi-mifano inayohusika zaidi itafuata.) Mtoto wa kwanza ana uzito wa kilo 26.0 na anakaa 1.60 m kutoka pivot.
- Ikiwa mtoto wa pili ana uzito wa kilo 32.0, ni mbali gani kutoka pivot?
- Ni nini\(F_p\), nguvu inayounga mkono inayotumiwa na pivot?
Mkakati
Masharti yote ya usawa lazima yatimizwe. Katika sehemu (a), tunaulizwa umbali; hivyo, hali ya pili (kuhusu torques) inapaswa kutumika, kwa kuwa kwanza (kuhusu nguvu tu) haina umbali ndani yake. Ili kuomba hali ya pili ya usawa, sisi kwanza kutambua mfumo wa riba kuwa seesaw pamoja na watoto wawili. Tunachukua pivot inayounga mkono kuwa hatua ambayo torques huhesabiwa. Sisi kisha kutambua nguvu zote za nje zinazofanya mfumo.
Suluhisho (a)
Nguvu tatu za nje zinazofanya mfumo ni uzito wa watoto wawili na nguvu ya kusaidia ya pivot. Hebu tuchunguze wakati uliozalishwa na kila mmoja. Torque hufafanuliwa kuwa
\[\tau = rF \, \sin \, \theta. \nonumber\]
Hapa\(\theta = 90^o,\) ili\(sin \, \theta = 1\) kwa majeshi yote matatu. Hiyo ina maana\(r_{\perp} = r\) kwa wote watatu. Torques exerted na majeshi matatu ni ya kwanza,
\[\tau_1 = r_1w_1\nonumber\]
pili,
\[\tau_2 = -r_2w_2\nonumber\]
na ya tatu,
\[ \begin{align*} \tau_p &= r_pF_p \\[5pt] &= 0 \cdot F_p \\[5pt] &= 0. \end{align*}\]
Kumbuka kuwa ishara minus imeingizwa katika equation pili kwa sababu moment hii ni clockwise na kwa hiyo ni hasi kwa mkataba. Kwa kuwa\(F_p\) vitendo moja kwa moja kwenye hatua ya pivot, umbali\(r_p\) ni sifuri. Nguvu inayofanya pivot haiwezi kusababisha mzunguko, kama vile kusuja moja kwa moja kwenye vidole vya mlango hautaifanya kugeuka. Sasa, hali ya pili ya usawa ni kwamba jumla ya torques juu ya watoto wote ni sifuri. Kwa hiyo
\[\tau_2 = -\tau_1,\nonumber\]
au
\[r_2w_2 = r_1w_1.\nonumber\]
Uzito ni mara nyingi kuongeza kasi kutokana na mvuto. Kuingia\(mg\) kwa\(w\), tunapata
\[r_2m_2g = r_1w_1g.\nonumber\]
Tatua hili kwa haijulikani\(r_2\):
\[r_2 = r_1\dfrac{m_1}{m_2}.\nonumber\]
Kiasi upande wa kulia wa equation hujulikana; hivyo,\(r_2\) ni
\[ \begin{align*} r_2 &= (1.60 \, m)\dfrac{26.0 \, kg}{32.0 \, kg} \\[5pt] &= 1.30 \, m \end{align*}\]
Kama inavyotarajiwa, mtoto mzito anapaswa kukaa karibu na pivot (1.30 m dhidi ya 1.60 m) ili kusawazisha kilele.
Suluhisho (b)
Sehemu hii inauliza nguvu\(F_p\). Njia rahisi zaidi ya kuipata ni kutumia hali ya kwanza ya usawa, ambayo ni
\[net \, F = 0.\nonumber\]
Majeshi yote ni wima, ili tuweze kushughulika na tatizo moja-dimensional pamoja na mhimili wima; kwa hiyo, hali inaweza kuandikwa kama
\[net \, F_y = 0 \nonumber\]
ambapo sisi tena wito mhimili wima y -axis. Kuchagua juu kuwa mwelekeo mzuri, na kutumia pamoja na ishara ndogo ili kuonyesha maelekezo ya majeshi, tunaona hiyo
\[F_p - w_1 - w_2 = 0.\nonumber\]
Equation hii inazalisha nini inaweza kuwa guessed mwanzoni:
\[F_p = w_1 + w_2. \nonumber\]
Hivyo, pivot hutoa nguvu ya kusaidia sawa na uzito wa jumla wa mfumo:
\[F_p = m_1g + m_2g. \nonumber\]
Kuingia maadili inayojulikana inatoa
\[ \begin{align*} F_p &= (26.0 \, kg)(9.80 \, m/s^2) + (32.0 \, kg)(9.80 \, m/s^2) \\[5pt] &= 568 \, N. \end{align*}\]
Majadiliano
Matokeo mawili hufanya maana ya angavu. Mtoto mzito anakaa karibu na pivot. Pivot inasaidia uzito wa watoto wawili. Sehemu (b) pia inaweza kutatuliwa kwa kutumia hali ya pili ya usawa, kwa kuwa umbali wote hujulikana, lakini tu ikiwa hatua ya egemeo imechaguliwa kuwa mahali pengine isipokuwa mahali pa pivot halisi ya pembeni!
Vipengele kadhaa vya mfano uliotangulia vina maana pana. Kwanza, uchaguzi wa egemeo kama hatua karibu ambayo torques ni mahesabu kilichorahisishwa tatizo. Kwa kuwa\(F_p\) ni exerted juu ya hatua egemeo, mkono wake lever ni sifuri. Kwa hiyo, wakati uliofanywa na nguvu ya kusaidia\(F_p\) ni jamaa ya sifuri na hatua hiyo ya pivot. Hali ya pili ya usawa inashikilia uchaguzi wowote wa hatua ya egemeo, na hivyo tunachagua hatua ya egemeo ili kurahisisha suluhisho la tatizo.
Pili, kuongeza kasi kutokana na mvuto kufutwa katika tatizo hili, na sisi waliachwa na uwiano wa raia. Hii si mara zote kuwa kesi. Daima kuingia vikosi sahihi-si kuruka mbele kuingia baadhi ya uwiano wa raia.
Tatu, uzito wa kila mtoto ni kusambazwa juu ya eneo la mteremko, lakini sisi kutibiwa uzito kama kwamba kila nguvu walikuwa exerted katika hatua moja. Hii si makadirio ya umbali\(r_{\perp}\) na\(r_2\) ni umbali wa pointi moja kwa moja chini ya katikati ya mvuto wa kila mtoto. Kama tutakavyoona katika sehemu inayofuata, wingi na uzito wa mfumo unaweza kutenda kama iko katika hatua moja.
Hatimaye, kumbuka kuwa dhana ya wakati ina umuhimu zaidi ya usawa wa tuli. Torque ina jukumu sawa katika mwendo wa mzunguko ambao nguvu hucheza katika mwendo wa mstari. Tutachunguza hili katika sura inayofuata.
Kuchukua-nyumbani majaribio
- Kuchukua kipande cha udongo wa mfano na kuiweka kwenye meza, halafu piga silinda chini ndani yake ili mtawala anaweza kusawazisha upande wa pande zote za silinda wakati kila kitu kinabaki bado. Weka senti 8 cm mbali na egemeo. Unahitaji wapi kuweka pennies mbili kwa usawa? Pennies tatu?
Muhtasari
- Hali ya pili inathibitisha torques hizo pia zina usawa. Torque ni sawa mzunguko wa nguvu katika kuzalisha mzunguko na hufafanuliwa kuwa\[\tau = rF \, \sin \, \theta \nonumber\] ambapo\(\tau\) ni moment,\(r\) ni umbali kutoka egemeo uhakika kwa uhakika ambapo nguvu ni kutumika,\(F\) ni ukubwa wa nguvu, na\(\theta\) ni angle kati\(F\) na vector iliyoongozwa kutoka mahali ambapo nguvu hufanya hatua ya egemeo. Mkono wa lever perpendicular\(r_{\perp}\) hufafanuliwa kuwa\[r_{\perp} = r \, \sin \, \theta \nonumber\] hivyo\[\tau = r_{\perp}F. \nonumber\]
- Mkono wa lever perpendicular\(r_{\perp}\) ni umbali mfupi zaidi kutoka hatua ya pivot hadi mstari ambao\(F\) hufanya. Kitengo cha SI kwa wakati ni newton mita (N\ cdot m). Hali ya pili muhimu ili kufikia usawa ni kwamba moment ya nje ya wavu kwenye mfumo lazima iwe sifuri:\[ net \, \tau = 0 \nonumber\] Kwa mkataba, torques kinyume chake ni chanya, na torques ya saa moja kwa moja ni hasi.
faharasa
- moment
- kugeuka au kupotosha ufanisi wa nguvu
- mkono wa lever ya pembeni
- umbali mfupi zaidi kutoka hatua ya egemeo hadi mstari ambao\(F\) uongo
- SI vitengo vya wakati
- newton mara mita, kawaida imeandikwa kama n · m
- kituo cha mvuto
- mahali ambapo uzito wa jumla wa mwili unadhaniwa kuwa umejilimbikizia