
11.3: Kasi ya Angular
- Page ID
- 176575

- Eleza asili ya vector ya kasi ya angular
- Pata kasi ya jumla ya angular na wakati kuhusu asili iliyochaguliwa ya mfumo wa chembe
- Tumia kasi ya angular ya mwili mgumu unaozunguka juu ya mhimili uliowekwa
- Tumia wakati juu ya mwili mgumu unaozunguka juu ya mhimili uliowekwa
- Tumia uhifadhi wa kasi ya angular katika uchambuzi wa vitu vinavyobadilisha kiwango cha mzunguko
Kwa nini Dunia inaendelea kugeuka? Nini ilianza inazunguka kuanza na? Kwa nini mvuto wa mvuto wa Dunia hauleta Mwezi kuelekea Dunia? Na skater ya barafu inawezaje kuzunguka kwa kasi na kwa kasi tu kwa kuvuta mikono yake ndani? Kwa nini yeye hawana haja ya kutumia muda wa kuzunguka kwa kasi?
Jibu la maswali haya ni kwamba kama mwendo wa jumla wa mstari (kasi) katika ulimwengu umehifadhiwa, ndivyo mwendo wa mzunguko wa jumla umehifadhiwa. Tunaita mwendo wa mzunguko wa angular kasi, mwenzake wa mzunguko kwa kasi ya mstari. Katika sura hii, sisi kwanza kufafanua na kisha kuchunguza kasi angular kutoka aina ya maoni. Kwanza, hata hivyo, tunachunguza kasi ya angular ya chembe moja. Hii inaruhusu sisi kuendeleza kasi ya angular kwa mfumo wa chembe na kwa mwili mgumu.
Mzunguko wa angular wa Chembe moja
Kielelezo\(\PageIndex{1}\) kinaonyesha chembe katika nafasi\(\vec{r}\) na kasi linear\(\vec{p}\) = m kwa heshima\(\vec{v}\) na asili. Hata kama chembe haipatikani kuhusu asili, bado tunaweza kufafanua kasi ya angular kwa suala la vector ya msimamo na kasi ya mstari.
Kasi\(\vec{l}\) ya angular ya chembe hufafanuliwa kama bidhaa ya msalaba\(\vec{r}\) na\(\vec{p}\), na ni perpendicular kwa ndege iliyo\(\vec{r}\) na\(\vec{p}\):
\[\vec{l} = \vec{r} \times \vec{p} \ldotp \label{11.5}\]
Nia ya kuchagua mwelekeo wa kasi ya angular kuwa perpendicular kwa ndege zenye\(\vec{r}\) na\(\vec{p}\) ni sawa na kuchagua mwelekeo wa moment kuwa perpendicular kwa ndege ya\(\vec{r}\) na\(\vec{F}\), kama ilivyojadiliwa katika Mzunguko wa Axis. Ukubwa wa kasi ya angular hupatikana kutoka kwa ufafanuzi wa bidhaa za msalaba,
\[l = rp \sin \theta,\]
\(\theta\)wapi pembe kati\(\vec{r}\) na\(\vec{p}\). Vitengo vya kasi ya angular ni kilo • m 2 /s. Kama ilivyo kwa ufafanuzi wa moment, tunaweza kufafanua mkono wa lever\(r_\perp\) ambayo ni umbali wa perpendicular kutoka vector kasi\(\vec{p}\) hadi asili,\(r_\perp = r \sin \theta\). Kwa ufafanuzi huu, ukubwa wa kasi ya angular inakuwa
\[l = r_{\perp} p = r_{\perp} mv \ldotp\]
Tunaona kwamba kama mwelekeo wa\(\vec{p}\) ni kama kwamba hupita kupitia asili, basi\(\theta\) = 0, na kasi ya angular ni sifuri kwa sababu mkono wa lever ni sifuri. Kwa suala hili, ukubwa wa kasi ya angular inategemea uchaguzi wa asili. Ikiwa tunachukua muda wa muda wa kasi ya angular, tunakuja kwa kujieleza kwa wakati kwenye chembe:
\[ \begin{align*} \frac{d \vec{l}}{dt} &= \frac{d \vec{r}}{dt} \times \vec{p} + \vec{r} \times \frac{d \vec{p}}{dt} \\[4pt] &= \vec{v} \times m \vec{v} + \vec{r} \times \frac{d \vec{p}}{dt} \\[4pt] &= \vec{r} \times \frac{d \vec{p}}{dt} \ldotp \end{align*}\]
Hapa tumetumia ufafanuzi wa\(\vec{p}\) na ukweli kwamba vector ilivuka yenyewe ni sifuri. Kutoka kwa sheria ya pili ya Newton\(\frac{d \vec{p}}{dt} = \sum \vec{F}\), nguvu ya wavu inayofanya chembe, na ufafanuzi wa wakati wa wavu, tunaweza kuandika
\[\frac{d \vec{l}}{dt} = \sum \vec{\tau} \ldotp \label{11.6}\]
Kumbuka kufanana na matokeo ya mstari wa sheria ya pili ya Newton,\(\frac{d \vec{p}}{dt} = \sum \vec{F}\). Mkakati wafuatayo wa kutatua matatizo unaweza kutumika kama mwongozo wa kuhesabu kasi ya angular ya chembe.
- Chagua mfumo wa kuratibu kuhusu kasi ya angular inapaswa kuhesabiwa.
- Andika vector radius kwa chembe uhakika katika kitengo vector notation.
- Andika vector linear kasi ya chembe katika kitengo vector nukuu.
- Chukua bidhaa ya msalaba\(\vec{l} = \vec{r} \times \vec{p}\) na utumie utawala wa mkono wa kulia ili kuanzisha mwelekeo wa vector ya kasi ya angular.
- Angalia ikiwa kuna utegemezi wa wakati katika usemi wa vector ya kasi ya angular. Ikiwa kuna, basi wakati unao juu ya asili, na\(\frac{d \vec{l}}{dt} = \sum \vec{\tau}\) utumie kuhesabu wakati. Ikiwa hakuna utegemezi wa wakati katika kujieleza kwa kasi ya angular, basi wakati wa wavu ni sifuri.
Meteor inaingia katika anga ya Dunia (Kielelezo\(\PageIndex{2}\)) na inazingatiwa na mtu chini kabla ya kuchoma juu ya anga. Vector\(\vec{r}\) = 25 km\(\hat{i}\) + 25 km\(\hat{j}\) inatoa nafasi ya meteor kwa heshima kwa mwangalizi. Kwa papo hapo mwangalizi anaona meteor, ina kasi ya mstari\(\vec{p}\) = (15.0 kg) (-2.0 km/s\(\hat{j}\)), na inaharakisha kwa mara kwa mara 2.0 m/s (\(− \hat{j}\)) kwenye njia yake, ambayo kwa madhumuni yetu inaweza kuchukuliwa kama mstari wa moja kwa moja.
- Je! Ni kasi gani ya angular ya meteor kuhusu asili, ambayo iko mahali pa mwangalizi?
- Je, ni wakati gani juu ya meteor kuhusu asili?
Mkakati
Sisi kutatua kasi katika x- na y vipengele na kutumia equations kinematic kueleza kasi kama kazi ya kuongeza kasi na wakati. Tunaingiza maneno haya kwa kasi ya mstari na kisha kuhesabu kasi ya angular kwa kutumia bidhaa ya msalaba. Kwa kuwa vectors nafasi na kasi ni katika xy-ndege, tunatarajia vector kasi angular kuwa pamoja z-axis. Ili kupata wakati huo, tunachukua muda wa muda wa kasi ya angular.
Suluhisho
Meteor inaingia katika angahewa ya Dunia kwa pembe ya 90.0° chini ya mlalo, hivyo vipengele vya kuongeza kasi katika maelekeo x- na y ni
\[a_{x} = 0,\; a_{y} = -2.0\; m/s^{2} \ldotp \nonumber\]
Tunaandika kasi kwa kutumia equations kinematic.
\[v_{x} = 0,\; v_{y} = (-2.0 \times 10^{3}\; m/s) - (2.0\; m/s^{2})t \ldotp \nonumber\]
- Kasi ya angular ni\[\begin{split} \vec{l} & = \vec{r} \times \vec{p} = (25.0\; km\; \hat{i} + 25.0\; km\; \hat{j}) \times (15.0\; kg)(0 \hat{i} + v_{y} \hat{j}) \\ & = 15.0\; kg [ 25.0\; km (v_{y}) \hat{k}] \\ & = 15.0\; kg \{ (2.50 \times 10^{4}\; m)[(-2.0 \times 10^{3}\; m/s) - (2.0\; m/s^{2})t] \hat{k} \} \ldotp \end{split} \nonumber\] Katika t = 0, kasi ya angular ya meteor kuhusu asili ni\[\vec{l}_{0} = 15.0\; kg [ (2.50 \times 10^{4}\; m)(-2.0 \times 10^{3}\; m/s) \hat{k}] = 7.50 \times 10^{8}\; kg\; \cdotp m^{2}/s (- \hat{k}) \ldotp \nonumber\] Hii ni papo kwamba mwangalizi anaona meteor.
- Ili kupata wakati huo, tunachukua muda wa muda wa kasi ya angular. Kuchukua derivative wakati wa\(\vec{l}\) kama kazi ya muda, ambayo ni equation pili mara moja juu, tuna\[\frac{d \vec{l}}{dt} = (-15.0\; kg)(2.50 \times 10^{4}\; m)(2.0\; m/s^{2}) \hat{k} \ldotp \nonumber\] Kisha, tangu\(\frac{d \vec{l}}{dt} = \sum \vec{\tau}\), tuna vitengo\[\sum \vec{\tau} = -7.5 \times 10^{5}\; N\; \cdotp m\; \hat{k} \ldotp \nonumber\] ya moment wanapewa kama Newton mita, si kwa kuchanganyikiwa na joules. Kama hundi, tunaona kwamba mkono wa lever ni sehemu ya x-ya vector\(\vec{r}\) katika Kielelezo kwa\(\PageIndex{2}\) kuwa ni perpendicular kwa nguvu inayofanya meteor, ambayo iko njiani. Kwa sheria ya pili ya Newton, nguvu hii ni $$\ vec {F} = ma (-\ kofia {j}) = (15.0\; kg) (2.0\; m/s^ {2}) (-\ kofia {j}) = 30.0\; kg\;\ cdotp m/s^ {2} (-\ kofia {j})\ LDOTP $Mkono wa lever ni $$\ ves c {r} _ {\ perp} = 2.5\ mara 10^ {4}\; m\;\ kofia {i}\ ldOTP $Kwa hiyo, wakati ni $$\ kuanza {mgawanyiko}\ jumla\ vec {\ tau} =\ vec {r} _ {\ perp}\ mara\ vec {F } & = (2.5\ mara 10^ {4}\; m\;\ kofia {i})\ mara (-30.0\; kg\;\ cdotp m/s^ {2}\;\ kofia {j}),\\ & = 7.5\ mara 10^ {5}\; N\;\ cdotp m (-\ kofia {k})\ ldotp\ mwisho {mgawanyiko} $$
Umuhimu
Kwa kuwa meteor inaharakisha chini kuelekea Dunia, radius yake na vector kasi hubadilika. Kwa hiyo, tangu\(\vec{l} = \vec{r} \times \vec{p}\), kasi ya angular inabadilika kama kazi ya wakati. Wakati juu ya meteor kuhusu asili, hata hivyo, ni mara kwa mara, kwa sababu mkono wa lever\(\vec{r}_{\perp}\) na nguvu juu ya meteor ni mara kwa mara. Mfano huu ni muhimu kwa kuwa unaonyesha kwamba kasi ya angular inategemea uchaguzi wa asili ambayo ni mahesabu. Njia zilizotumiwa katika mfano huu pia ni muhimu katika kuendeleza kasi ya angular kwa mfumo wa chembe na kwa mwili mgumu.
Proton inayozunguka shamba la magnetic hufanya mwendo wa mviringo katika ndege ya karatasi, kama inavyoonekana hapa chini. Njia ya mviringo ina radius ya 0.4 m na proton ina kasi 4.0 x 10 6 m/s. kasi ya angular ya proton kuhusu asili ni nini?
Mzunguko wa Angular wa Mfumo wa Chembe
Kasi ya angular ya mfumo wa chembe ni muhimu katika taaluma nyingi za kisayansi, moja kuwa astronomia. Fikiria galaxi ya ond, kisiwa kinachozunguka cha nyota kama Milky Way yetu. Nyota za mtu binafsi zinaweza kutibiwa kama chembe za uhakika, ambayo kila mmoja ina kasi yake ya angular. Jumla ya vector ya momenta ya mtu binafsi ya angular hutoa kasi ya angular ya galaxy. Katika sehemu hii, tunaendeleza zana ambazo tunaweza kuhesabu kasi ya angular ya mfumo wa chembe.
Katika sehemu iliyotangulia, tulianzisha kasi ya angular ya chembe moja kuhusu asili iliyochaguliwa. Maneno ya kasi hii ya angular ni\(\vec{l} = \vec{r} \times \vec{p}\), ambapo vector\(\vec{r}\) inatoka asili hadi chembe, na\(\vec{p}\) ni kasi ya mstari wa chembe. Ikiwa tuna mfumo wa chembe za N, kila mmoja na vector ya msimamo kutoka asili iliyotolewa\(\vec{r}_{i}\) na kila mmoja akiwa na kasi\(\vec{p}_{i}\), basi kasi ya angular ya mfumo wa chembe kuhusu asili ni jumla ya vector ya momenta ya mtu binafsi kuhusu asili. Hiyo ni,
\[\vec{L} = \vec{l}_{1} + \vec{l}_{2} + \cdots + \vec{l}_{N} \ldotp \label{11.7}\]
Vilevile, kama chembe i iko chini ya moment wavu\(\vec{\tau_{i}}\) kuhusu asili, basi tunaweza kupata moment wavu kuhusu asili kutokana na mfumo wa chembe kwa kutofautisha Equation 11.7:
\[\frac{d \vec{L}}{dt} = \sum_{i} \frac{d \vec{l}_{i}}{dt} = \sum_{i} \tau_{i} \ldotp\]
Jumla ya torques ya mtu binafsi hutoa wakati wa nje wa nje kwenye mfumo, ambao tunaweka\(\sum \vec{\tau}\). Hivyo,
\[\frac{d \vec{L}}{dt} = \sum_{i} \tau_{i} \ldotp \label{11.8}\]
Equation\ ref {11.8} inasema kuwa kiwango cha mabadiliko ya jumla ya kasi ya angular ya mfumo ni sawa na moment wavu wa nje inayofanya mfumo wakati kiasi vyote viwili vinapimwa kwa heshima ya asili iliyotolewa. Equation\ ref {11.8} inaweza kutumika kwa mfumo wowote una kasi ya angular, ikiwa ni pamoja na miili rigid, kama ilivyojadiliwa katika sehemu inayofuata.
Akizungumzia Kielelezo\(\PageIndex{1a}\):
- Kuamua jumla ya kasi ya angular kutokana na chembe tatu kuhusu asili.
- Je! Ni kiwango gani cha mabadiliko ya kasi ya angular?
Mkakati
Andika nafasi na vectors kasi kwa chembe tatu. Tumia momenta ya angular ya mtu binafsi na uwaongeze kama vectors ili kupata kasi ya angular jumla. Kisha fanya hivyo kwa torques.
Suluhisho
- Chembe 1: $$\ vec {r} _ {1} = -2.0\; m\;\ kofia {i} + 1.0\; m\;\ kofia {j},\;\ vec {p} _ {1} = (2.0\; kg) (4.0\; m/s\;\ kofia {j}) = 8.0\; kg\;\ cdotp m/s\;\ kofia {j}, $$ $\ vec {l} _ {1} =\ vec {r} _ {1}\ mara\ vec {p} _ {1} = -16.0\; kg\;\ cdotp m^ {2} /s\;\ kofia {k}\ ldotp $$ Chembe 2: $$\ vec {r} _ {2} = 4.0\; m\;\ kofia {k}\ kofia {} + 1.0\; m\;\ kofia {j},\;\ vec {p} _ {2} = (4.0\; kg) (5.0\; m/s\;\ kofia {i}) = 20.0\; kg\;\ cdotp m/s\;\ kofia {i}, $$ $\ vec {l} _ {2} _ {2}\ nyakati\ p} _ {p} = -20.0\; kilo\;\ cdotp m^ {2} /s\;\ kofia {k}\ lDOTP $chembe 3: $$\ vec {r} _ {3} = 2.0\; m\;\ kofia {i} - 2.0\; m\;\ kofia {j},\;\ vec {p} _ {3} = (1.0\; kg) (3.0\; m/s\;\ kofia {i}) = 3.0\; kilo\; \ cdotp m/s\;\ kofia {j}, $$ $\ vec {l} _ {3} =\ vec {r} _ {3}\ mara\ vec {p} _ {3} = 6.0\; kg\;\ cdotp m^ {2} /s\;\ kofia {k}\ ldOTP $Tunaongeza momanta ya angular ya mtu binafsi ili kupata jumla kuhusu asili: $$\ vec {l} _ {T} =\ vec {l} _ {1} +\ vec {l} _ {2} +\ vec {l} _ {l} _ {3} = -30\; kg\;\ cdotp m^ {2} /s\;\ kofia {k}\ ldotp $$
- Vikosi vya mtu binafsi na silaha za lever ni $$\ kuanza {mgawanyiko}\ vec {r} _ {1\ perp} & = 1.0\; m\;\ kofia {j},\;\ vec {F} _ {1} = -6.0\; N\;\ kofia {i},\;\ vec {\ tau} _ {1} = 6.0\;\ cdotp m\;\ kofia {k}\\ vec {r} _ {2\ perp} & = 4.0\; m\;\ kofia {i},\;\ vec {F} _ {2} = 10.0\; N\;\ kofia {i},\;\ vec {\ tau} _ {2} = 40.0\;\ cdotp m\;\ kofia {k}\\ vec {r} _ {3\ perp} & = 2.0\; m\;\ kofia {j},\;\ vec {F} _ {3} = -8.0\; N\;\ kofia {j},\;\ vec {\ tau} _ {3} = -16.0\;\ cdotp m\;\ kofia {k\} ldotp\ mwisho {mgawanyiko} $$Kwa hiyo: $$\ sum_ {i}\ vec {\ tau} _ {i} =\ vec {\ tau} _ {1} +\ vec {\ tau} _ {2} +\ vec {\ tau} _ {3} = 30\; N\;\ cdotp m\;\ kofia {k}\ ldotp $$
Umuhimu
Mfano huu unaeleza kanuni superposition kwa kasi angular na moment ya mfumo wa chembe. Uangalizi lazima uchukuliwe wakati wa kutathmini wadudu\(\vec{r}_{i}\) wa radius wa chembe ili kuhesabu momenta ya angular,\(\vec{r}_{i \perp}\) na silaha za lever, kuhesabu torques, kwa kuwa ni kiasi tofauti kabisa.
Mzunguko wa Angular wa Mwili Rigid
Tumechunguza kasi ya angular ya chembe moja, ambayo sisi ujumla kwa mfumo wa chembe. Sasa tunaweza kutumia kanuni zilizojadiliwa katika sehemu iliyopita ili kuendeleza dhana ya kasi ya angular ya mwili mgumu. Vitu vya mbinguni kama vile sayari vina kasi ya angular kutokana na spin na mizunguko inayozunguka nyota. Katika uhandisi, chochote kinachozunguka kuhusu mhimili hubeba kasi ya angular, kama vile flywheels, propellers, na sehemu zinazozunguka katika inji. Maarifa ya momenta angular ya vitu hivi ni muhimu kwa kubuni ya mfumo ambao wao ni sehemu.
Ili kuendeleza kasi ya angular ya mwili mgumu, tunatengeneza mwili mgumu kama unaojumuisha makundi madogo,\(\Delta\) m i. Katika Kielelezo\(\PageIndex{4}\), mwili mgumu unakabiliwa na mzunguko juu ya mhimili wa z na kasi ya angular\(\omega\). Makundi yote ya molekuli ambayo hufanya mwili mgumu hupata mwendo wa mviringo kuhusu mhimili wa z na kasi sawa ya angular. Sehemu (a) ya takwimu inaonyesha sehemu ya molekuli\(\Delta\) m i na vector msimamo\(\vec{r}_{i}\) kutoka asili na radius R i kwa mhimili z. Ukubwa wa kasi yake ya tangential ni v i = R i\(\omega\). Kwa sababu vectors\(\vec{v}_{i}\) na\(\vec{r}_{i}\) ni perpendicular kwa kila mmoja, ukubwa wa kasi ya angular ya sehemu hii ya molekuli ni
\[l_{i} = r_{i} (\Delta mv_{i}) \sin 90^{o} \ldotp\]
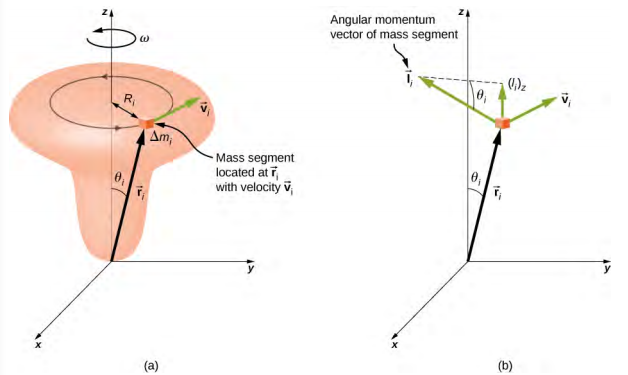
Kutumia utawala wa mkono wa kulia, pointi ya vector ya kasi ya angular katika mwelekeo unaoonyeshwa kwenye Kielelezo\(\PageIndex{4b}\). Jumla ya momenta ya angular ya makundi yote ya wingi ina vipengele vyote pamoja na perpendicular kwa mhimili wa mzunguko. Kila sehemu ya molekuli ina sehemu ya perpendicular ya kasi ya angular ambayo itafutwa na sehemu ya perpendicular ya sehemu inayofanana ya molekuli upande wa pili wa mwili mgumu. Hivyo, sehemu kando ya mzunguko wa mzunguko ni sehemu pekee ambayo inatoa thamani isiyo ya sifuri wakati inaongozwa juu ya makundi yote ya wingi. Kutoka sehemu (b), sehemu ya\(\vec{l}_{i}\) pamoja na mzunguko wa mzunguko ni
\[\begin{split} (l_{i})_{z} & = l_{i} \sin \theta_{i} = (r_{i} \Delta m_{i} v_{i}) \sin \theta_{i}, \\ & = (r_{i} \sin \theta_{i})(\Delta m_{i} v_{i}) = R_{i} \Delta m_{i} v_{i} \ldotp \end{split}\]
Mzunguko wa angular wa mwili mgumu pamoja na mhimili wa mzunguko ni
\[L = \sum_{i} (\vec{l}_{i})_{z} = \sum_{i} R_{i} \Delta m_{i} v_{i} = \sum_{i} R_{i} \Delta m_{i} (R_{i} \omega) = \omega \sum_{i} \Delta m_{i} (R_{i})^{2} \ldotp\]
\(\sum_{i} \Delta\)Summation (R i) 2 ni wakati tu wa inertia I ya mwili mgumu kuhusu mhimili wa mzunguko. Kwa hoop nyembamba inayozunguka juu ya mhimili perpendicular kwa ndege ya hoop, kila R i ni sawa na R hivyo summation inapunguza R 2\(\sum_{i} \Delta\) m i = mR 2, ambayo ni wakati wa inertia kwa hoop nyembamba iliyopatikana kwenye Mchoro 10.20. Hivyo, ukubwa wa kasi ya angular pamoja na mzunguko wa mwili mgumu unaozunguka na kasi ya angular\(\omega\) kuhusu mhimili ni
\[L = I \omega \ldotp \label{11.9}\]
Equation hii ni sawa na ukubwa wa kasi ya mstari p = mv. Mwelekeo wa vector ya kasi ya angular huelekezwa kwenye mhimili wa mzunguko uliotolewa na utawala wa mkono wa kulia.
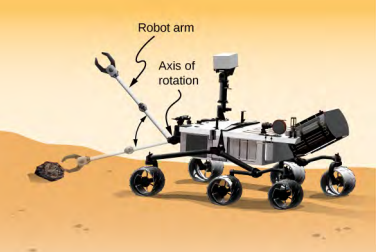
mkono robot juu ya Rover Mars kama udadisi inavyoonekana katika Kielelezo\(\PageIndex{5}\) ni 1.0 m mrefu na ina forceps katika mwisho bure kuchukua miamba. Uzito wa mkono ni kilo 2.0 na wingi wa forceps ni 1.0 kg (Kielelezo\(\PageIndex{5}\)). Mkono wa robot na nguvups huhamia kutoka kupumzika hadi\(\omega\) = 0.1\(\pi\) rad/s katika 0.1 s.Inazunguka chini na kuchukua mwamba wa Mars ambao una uzito wa kilo 1.5. Mhimili wa mzunguko ni mahali ambapo mkono wa robot unaunganisha na rover.
- Je! Ni kasi gani ya angular ya mkono wa robot yenyewe kuhusu mhimili wa mzunguko baada ya 0.1 s wakati mkono umeacha kuharakisha?
- Je! Ni kasi gani ya angular ya mkono wa robot wakati ina mwamba wa Mars katika nguvu zake na inazunguka juu?
- Wakati mkono hauna mwamba katika nguvups, ni nini wakati kuhusu hatua ambapo mkono unaunganisha na Rover wakati unaharakisha kutoka kupumzika hadi kasi yake ya mwisho ya angular?
Mkakati
Tunatumia Equation\ ref {11.9} ili kupata kasi ya angular katika usanidi mbalimbali. Wakati mkono unapozunguka chini, utawala wa mkono wa kulia unatoa vector ya kasi ya angular iliyoongozwa nje ya ukurasa, ambayo tutaita mwelekeo mzuri wa z. Wakati mkono unapozunguka juu, utawala wa mkono wa kulia unatoa mwelekeo wa vector ya kasi ya angular kwenye ukurasa au katika mwelekeo mbaya wa z. Wakati wa inertia ni jumla ya wakati wa mtu binafsi wa inertia. Mkono unaweza kulinganishwa na fimbo imara, na nguvups na mwamba wa Mars unaweza kuhesabiwa kama raia wa uhakika ulio umbali wa m 1 kutoka asili. Kwa sehemu (c), tunatumia sheria ya pili ya Newton ya mwendo kwa mzunguko ili kupata moment kwenye mkono wa robot.
Suluhisho
- Kuandika chini wakati wa mtu binafsi ya hali, tuna
- mkono wa robot:\[I_{R} = \frac{1}{3} m_{R} r^{2} = \frac{1}{3} (2.00\; kg)(1.00\; m)^{2} = \frac{2}{3}\; kg\; \cdotp m^{2} \ldotp\]
- Forceps:\[I_{F} = m_{F} r^{2} = (1.0\; kg)(1.0\; m)^{2} = 1.0\; kg\; \cdotp m^{2} \ldotp\]
- Mars mwamba:\[I_{MR} = m_{MR} r^{2} = (1.5\; kg)(1.0\; m)^{2} = 1.5\; kg\; \cdotp m^{2} \ldotp\]
Kwa hiyo, bila mwamba wa Mars, wakati wa jumla wa hali ni
\[I_{Total} = I_{R} + I_{F} = 1.67\; kg\; \cdotp m^{2}\]
na ukubwa wa kasi ya angular ni
\[L = I \omega = (1.67\; kg\; \cdotp m^{2})(0.1 \pi\; rad/s) = 0.17 \pi\; kg\; \cdotp m^{2}/s \ldotp\]
Vector ya kasi ya angular inaelekezwa nje ya ukurasa katika\(\hat{k}\) mwelekeo tangu mkono wa robot unazunguka kinyume chake.
- Lazima tujumuishe mwamba wa Mars katika hesabu ya wakati wa hali, kwa hiyo tuna\[I_{Total} = I_{R} + I_{F} + I_{MR} = 3.17\; kg\; \cdotp m^{2}\] na\[L = I \omega = (3.17\; kg\; \cdotp m^{2})(0.1 \pi\; rad/s) = 0.32 \pi\; kg\; \cdotp m^{2}/s \ldotp\] Sasa vector ya kasi ya angular inaelekezwa kwenye ukurasa kwa\(− \hat{k}\) uongozi, kwa utawala wa mkono wa kulia, tangu mkono wa robot sasa unazunguka saa moja kwa moja.
- Tunapata moment wakati mkono hauna mwamba kwa kuchukua derivative ya kasi ya angular kwa kutumia Equation\ ref {11.8}\(\frac{d \vec{L}}{dt} = \sum \vec{\tau}\). Lakini tangu L = I\(\omega\), na kuelewa kwamba mwelekeo wa kasi ya angular na vectors moment ni pamoja na mhimili wa mzunguko, tunaweza kuzuia nukuu ya vector na kupata\[\frac{dL}{dt} = \frac{d (I \omega)}{dt} = I \frac{d \omega}{dt} = I \alpha = \sum \tau,\] ambayo ni sheria ya pili ya Newton ya mzunguko. Tangu\(\alpha = \frac{0.1 \pi\; rad/s}{0.1\; s} = \pi\; rad/s^{2}\), tunaweza kuhesabu wakati wa wavu:\[\sum \tau = I \alpha = (1.67\; kg\; \cdotp m^{2})(\pi\; rad/s^{2}) = 1.67 \pi\; N\; \cdotp m \ldotp\]
Umuhimu
Kasi ya angular katika (a) ni chini ya ile ya (b) kutokana na ukweli kwamba wakati wa inertia katika (b) ni kubwa kuliko (a), wakati kasi ya angular ni sawa.
Ambayo ina kasi kubwa ya angular: nyanja imara ya molekuli m inayozunguka kwenye mzunguko wa angular wa mara kwa mara\(\omega_{0}\) kuhusu mhimili wa z, au silinda imara ya mzunguko sawa na kiwango cha mzunguko kuhusu mhimili wa z?
Ziara Chuo Kikuu cha Colorado Interactive Simulation ya Angular Momentum kujifunza zaidi kuhusu kasi angular.