
9.6: Forças e torques nos músculos e articulações
- Page ID
- 194925

Objetivos de
Ao final desta seção, você poderá:
- Explique as forças exercidas pelos músculos.
- Declare como uma má postura causa tensão nas costas.
- Discuta os benefícios dos músculos esqueléticos ligados perto das articulações.
- Discuta várias complexidades do sistema real de músculos, ossos e articulações.
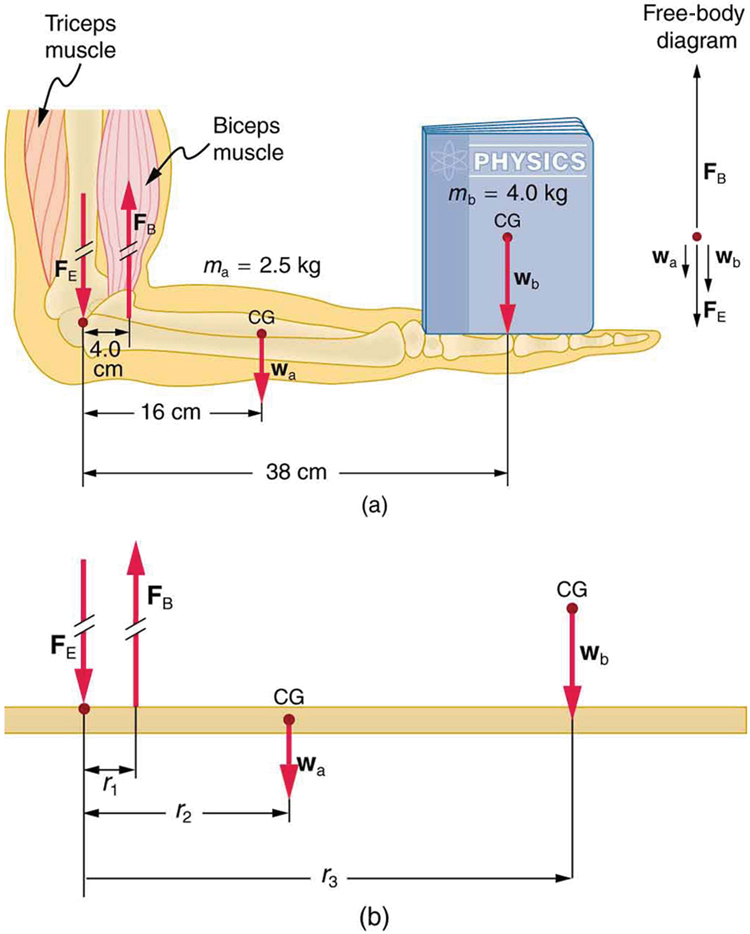
Músculos, ossos e articulações são algumas das aplicações mais interessantes da estática. Há algumas surpresas. Músculos, por exemplo, exercem forças muito maiores do que imaginamos. A figura mostra um antebraço segurando um livro e um diagrama esquemático de um sistema de alavanca análogo. O esquema é uma boa aproximação para o antebraço, que parece mais complicado do que é, e podemos obter algumas dicas sobre como os sistemas musculares típicos funcionam analisando-o.
Os músculos só podem se contrair, então eles ocorrem em pares. No braço, o músculo bíceps é um flexor, ou seja, ele fecha o membro. O músculo tríceps é um extensor que abre o membro. Essa configuração é típica dos músculos esqueléticos, ossos e articulações em humanos e outros vertebrados. A maioria dos músculos esqueléticos exerce forças muito maiores dentro do corpo do que os membros aplicam ao mundo exterior. O motivo fica claro quando percebemos que a maioria dos músculos está presa aos ossos por meio de tendões próximos às articulações, fazendo com que esses sistemas tenham vantagens mecânicas muito menos de uma. Ao vê-las como máquinas simples, a força de entrada é muito maior do que a força de saída, conforme visto na Figura.
Exemplo \(\PageIndex{1}\): Muscles Exert Bigger Forces Than You Might Think
Calcule a força que o músculo bíceps deve exercer para segurar o antebraço e sua carga, conforme mostrado na Figura, e compare essa força com o peso do antebraço mais sua carga. Você pode considerar os dados da figura com precisão de três números significativos.
Estratégia
Existem quatro forças atuando sobre o antebraço e sua carga (o sistema de interesse). A magnitude da força do bíceps é\(F_B\); a da articulação do cotovelo é\(F_E\); a dos pesos do antebraço é\(w_a\), e sua carga é\(w_b\). Duas delas são desconhecidas\((F_B\) e\(F_E)\), portanto, a primeira condição para o equilíbrio não pode, por si só, ceder\(F_B\). Mas se usarmos a segunda condição e escolhermos o pivô para ficar no cotovelo, o torque devido\(F_B\) é zero, e a única incógnita se torna\(F_B\).
Solução
Os torques criados pelos pesos são no sentido horário em relação ao pivô, enquanto o torque criado pelos bíceps é no sentido anti-horário; assim, a segunda condição para o equilíbrio\((net \, \tau = 0)\) se torna
\[r_2w_a + r_3w_b = r_1F_B.\]
Note isso\(sin \, \theta = 1\) para todas as forças, desde\(\theta = 90^o\) para todas as forças. Essa equação pode ser facilmente resolvida\(F_B\) em termos de quantidades conhecidas, produzindo\[F_B = \dfrac{r_2w_a + r_3w_b}{r_1}.\]
A inserção dos valores conhecidos fornece
\[F_B = \dfrac{(0.160 \, m)(2.50 \, kg)(9.80 \, m/s^2) + (0.380 \, m)(4.00 \, kg)(9.80 \, m/s^2)}{0.0400 \, m}\]
que rende\[F_B = 470 \, N.\]
Agora, o peso combinado do braço e sua carga é
\((6.50 \, kg)(9.80 \, m/s^2) = 63.7 \, N\), de modo que a razão entre a força exercida pelo bíceps e o peso total seja
\[\dfrac{F_B}{w_a + w_b} = \dfrac{470}{63.7} = 7.38.\]
Discussão
Isso significa que o músculo bíceps está exercendo uma força 7,38 vezes o peso suportado.
No exemplo acima do músculo bíceps, o ângulo entre o antebraço e a parte superior do braço é de 90°. Se esse ângulo mudar, a força exercida pelo músculo bíceps também muda. Além disso, o comprimento do músculo bíceps muda. A força que o músculo bíceps pode exercer depende de seu comprimento; é menor quando é mais curto do que quando é alongado.
Forças muito grandes também são criadas nas juntas. No exemplo anterior, a força descendente\(F_E\) exercida pelo úmero na articulação do cotovelo é igual a 407 N, ou 6,38 vezes o peso total suportado. (O cálculo de\(F_E\) é simples e é deixado como um problema de fim de capítulo.) Como os músculos podem se contrair, mas não se expandir além do comprimento de repouso, as articulações e os músculos geralmente exercem forças que agem em direções opostas e, portanto, se subtraem. (No exemplo acima, a força ascendente do músculo menos a força descendente da articulação é igual ao peso suportado, ou seja\(470 \, N - 470 \, N = 63 \, N\), aproximadamente igual ao peso suportado.) As forças nos músculos e articulações são maiores quando sua carga está a uma longa distância da articulação, como mostra o livro no exemplo anterior.
Em esportes de raquete, como o tênis, a extensão constante do braço durante o jogo cria grandes forças dessa maneira. A massa multiplicada pelo braço de alavanca de uma raquete de tênis é um fator importante, e muitos jogadores usam a raquete mais pesada que podem manusear. Não é de admirar que a deterioração das articulações e os danos nos tendões do cotovelo, como o “cotovelo de tenista”, possam resultar de movimentos repetitivos, torques indevidos e possivelmente má seleção de raquetes nesses esportes. Várias técnicas comprovadas para segurar e usar uma raquete, bastão ou bastão não apenas aumentam as habilidades esportivas, mas também podem minimizar a fadiga e os danos ao corpo a longo prazo. Por exemplo, bolas de tênis atingidas corretamente no “ponto ideal” da raquete resultarão em pouca vibração ou força de impacto na raquete e no corpo — menos torque, conforme explicado em Colisões de corpos estendidos em duas dimensões. Torcer a mão para dar a volta máxima à bola ou usar um cotovelo rígido estendido em um movimento de costas também pode agravar os tendões do cotovelo.
Treinadores e fisioterapeutas usam o conhecimento das relações entre forças e torques no tratamento de músculos e articulações. Na fisioterapia, uma rotina de exercícios pode aplicar uma força e torque específicos que podem, durante um período de tempo, reviver músculos e articulações. Alguns exercícios são projetados para serem realizados debaixo d'água, pois isso requer maiores forças a serem exercidas, fortalecendo ainda mais os músculos. No entanto, os tecidos que conectam os membros, como tendões e cartilagens, bem como as articulações, às vezes são danificados pelas grandes forças que eles carregam. Freqüentemente, isso ocorre devido a acidentes, mas atletas fortemente musculosos, como levantadores de peso, podem rasgar músculos e conectar tecidos apenas com esforço.
As costas são consideravelmente mais complicadas do que o braço ou a perna, com vários músculos e articulações entre as vértebras, todos com vantagens mecânicas inferiores a 1. Os músculos das costas devem, portanto, exercer forças muito grandes, que são suportadas pela coluna vertebral. Discos esmagados por mero esforço são muito comuns. A mandíbula é um tanto excepcional - os músculos masseteres que fecham a mandíbula têm uma vantagem mecânica maior que 1 para os dentes posteriores, o que nos permite exercer forças muito grandes com eles. Uma causa de dores de cabeça estressantes é o aperto persistente dos dentes, onde a grande força sustentada se traduz em fadiga nos músculos ao redor do crânio.
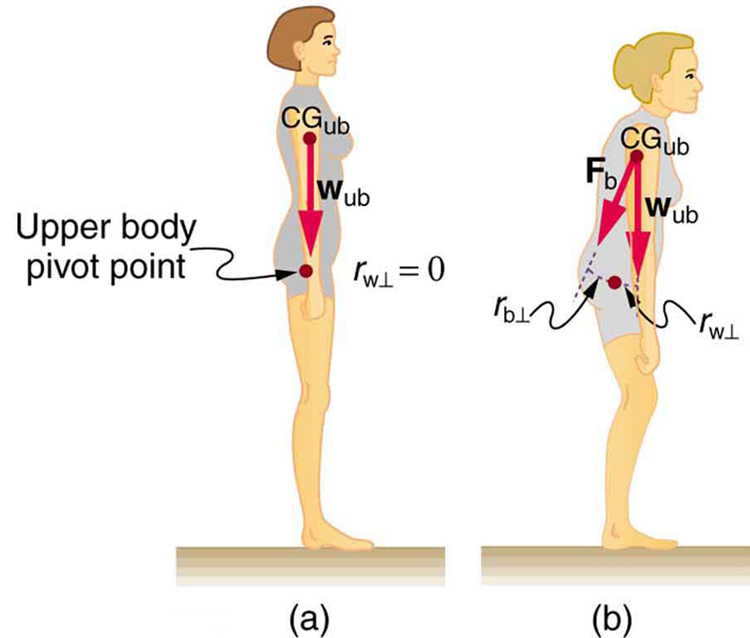
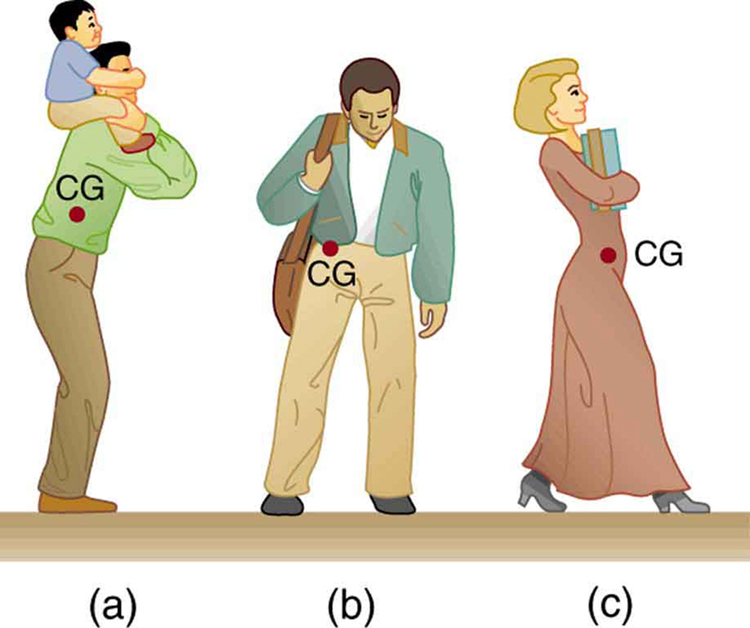
A figura mostra como a má postura causa tensão nas costas. Na parte (a), vemos uma pessoa com boa postura. Observe que o CG da parte superior do corpo está diretamente acima do ponto de articulação nos quadris, que por sua vez está diretamente acima da base de apoio em seus pés. Por causa disso, o peso da parte superior do corpo não exerce nenhum torque nos quadris. A única força necessária é uma força vertical nos quadris igual ao peso suportado. Nenhuma ação muscular é necessária, pois os ossos são rígidos e transmitem essa força do chão. Essa é uma posição de equilíbrio instável, mas apenas pequenas forças são necessárias para trazer a parte superior do corpo de volta à vertical se ela estiver levemente deslocada. A má postura é mostrada na parte (b); vemos que o cg da parte superior do corpo está na frente do pivô nos quadris. Isso cria um torque no sentido horário ao redor dos quadris que é neutralizado pelos músculos da região lombar. Esses músculos devem exercer grandes forças, pois geralmente apresentam pequenas vantagens mecânicas. (Em outras palavras, o braço da alavanca perpendicular para os músculos é muito menor do que para o cg.) A má postura também pode causar tensão muscular em pessoas sentadas em suas mesas usando computadores. Cadeiras especiais estão disponíveis para permitir que o CG do corpo seja mais facilmente posicionado acima do assento, para reduzir dores nas costas. A ação muscular prolongada produz tensão muscular. Observe que o cg de todo o corpo ainda está diretamente acima da base de suporte na parte (b) da Figura. Isso é obrigatório; caso contrário, a pessoa não estaria em equilíbrio. Nós nos inclinamos para frente pelo mesmo motivo ao carregar uma carga nas costas, para o lado ao carregar uma carga em um braço e para trás ao carregar uma carga à nossa frente, como pode ser visto na Figura.
Você provavelmente foi avisado contra levantar objetos com as costas. Essa ação, ainda mais do que uma má postura, pode causar tensão muscular e danificar discos e vértebras, uma vez que forças anormalmente grandes são criadas nos músculos das costas e na coluna vertebral.
Exemplo:\(\PageIndex{1}\): Do Not Lift with Your Back
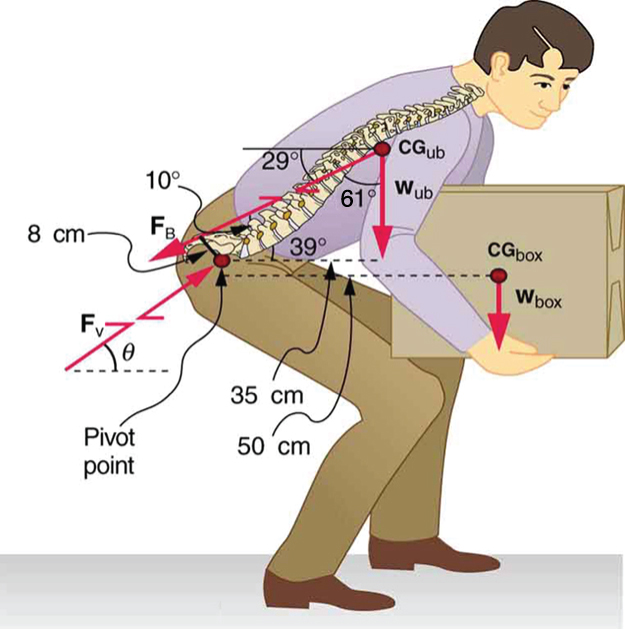
Considere a pessoa levantando uma caixa pesada com as costas, mostrada na Figura. (a) Calcule a magnitude da força\(F_B\) - nos músculos das costas que é necessária para sustentar a parte superior do corpo mais a caixa e compare isso com seu peso. A massa da parte superior do corpo é de 55,0 kg e a massa da caixa é de 30,0 kg. (b) Calcule a magnitude e a direção da força\(F_V\) exercida pelas vértebras na coluna vertebral no ponto de articulação indicado. Novamente, os dados na figura podem ser considerados precisos para três números significativos.
Estratégia
Até agora, sentimos que a segunda condição para o equilíbrio é um bom ponto de partida, e a inspeção dos valores conhecidos confirma que ela pode ser usada para resolver\(F_B\) - se o pivô for escolhido para ficar nos quadris. Os torques criados por\(w_{ab}\) e\(w_{box}\) - são no sentido horário, enquanto os criados por\(F_B \) - são no sentido anti-horário.
Solução para (a)
Usando os braços de alavanca perpendiculares dados na figura, a segunda condição para o equilíbrio\((net \, \tau = 0)\) se torna
\[(0.350 \, m)(55.0 \, kg)(9.80 \, m/s^2) + (0.500 \, m)(30.0 \, kg)(9.80 \, m/s^2) = (0.0800 \, m)F_B \]Solução para obter\(F_B\) rendimentos\[F_B = 4.20 \times 10^3 \, N.\]
A proporção da força que os músculos das costas exercem em relação ao peso da parte superior do corpo mais sua carga é
\[\dfrac{F_B}{w_{ub} + w_{box}} = \dfrac{4200 \, N}{833 \, N} = 5.04.\]
Essa força é consideravelmente maior do que seria se a carga não estivesse presente.
Solução para (b)
Mais importante em termos de seu potencial de dano é a força nas vértebras.\(F_V\) A primeira condição para o equilíbrio\((net \, F= 0)\) pode ser usada para encontrar sua magnitude e direção. Usando\(y\) fo4r vertical e\(x\) horizontal, a condição para que as forças externas líquidas ao longo desses eixos sejam zero
\[net \, F_y = 0 \, and \, net \, F_x = 0\]
Começando com os\((y)\) componentes verticais, isso produz
\[F_{V_y} - w_{ub} - w_{box} - F_B \, sin \, 29^o = 0.\]Assim,
\[F_{V_y} = w_{ub} + w_{box} + F_B \, sin \, 29.0^o\]
\[= 833 \, N + (4200 \, N) \, sin \, 29.0^o\]produzindo
\[F_{V_y} = 2.87 \times 10^3 \, N.\]
Da mesma forma, para os\((x)\) componentes horizontais,
\[F_{V_x} - F_B \, cos \, 29.0^o = 0\]produzindo
\[F_{V_x} = 3.67 \times 10^3 \, N.\]
A magnitude de\(F_V \) é dada pelo teorema de Pitágoras:
\[F_V = \sqrt{F_{V_x}^2 + F_{V_Y}^2} = 4.66 \times 10^3 \, N.\]
A direção de\(F_V\) é
\[\theta = tan^{-1} \left(\dfrac{F_{V_y}}{F_{V_x}} \right) = 38.0^o.\]
Observe que a proporção de em relação\(F_V\) ao peso suportado é\]\ dfrac {F_V} {w_ {ub} + w_ {box}} =\ dfrac {4660\, N} {833\, N} = 5,59.\]
Discussão
Essa força é cerca de 5,6 vezes maior do que seria se a pessoa estivesse ereta. O problema com as costas não é tanto que as forças sejam grandes — porque forças similares são criadas em nossos quadris, joelhos e tornozelos — mas que nossas espinhas são relativamente fracas. O levantamento adequado, realizado com as costas eretas e usando as pernas para levantar o corpo e a carga, cria forças muito menores nas costas — nesse caso, cerca de 5,6 vezes menores.
Quais são os benefícios de ter a maioria dos músculos esqueléticos presos tão perto das articulações? Uma vantagem é a velocidade, pois pequenas contrações musculares podem produzir grandes movimentos dos membros em um curto período de tempo. Outras vantagens são a flexibilidade e a agilidade, possibilitadas pelo grande número de juntas e pelas faixas nas quais elas funcionam. Por exemplo, é difícil imaginar um sistema com músculos bíceps presos ao punho que seja capaz da ampla amplitude de movimento que nós, vertebrados, possuímos.
Existem algumas complexidades interessantes em sistemas reais de músculos, ossos e articulações. Por exemplo, o ponto de articulação em muitas juntas muda de localização à medida que a junta é flexionada, de modo que os braços perpendiculares da alavanca e a vantagem mecânica do sistema também mudam. Assim, a força que o músculo bíceps deve exercer para segurar um livro varia conforme o antebraço é flexionado. Mecanismos similares operam nas pernas, o que explica, por exemplo, por que há menos tensão nas pernas quando um assento de bicicleta é colocado na altura adequada. Os métodos empregados nesta seção fornecem uma descrição razoável dos sistemas reais, desde que se saiba o suficiente sobre as dimensões do sistema. Há muitos outros exemplos interessantes de força e torque no corpo — alguns deles são o assunto de problemas de fim de capítulo.
Resumo
- A estática desempenha um papel importante na compreensão das tensões diárias em nossos músculos e ossos.
- Muitos sistemas de alavanca no corpo têm uma vantagem mecânica de significativamente menos de um, já que muitos de nossos músculos estão presos perto das articulações.
- Alguém com boa postura se levanta ou senta de forma que seu centro de gravidade fique diretamente acima do ponto de articulação dos quadris, evitando assim a tensão nas costas e danos aos discos.