
9.5: Máquinas simples
- Page ID
- 194984

Objetivos de
Ao final desta seção, você poderá:
- Descreva diferentes máquinas simples.
- Calcule a vantagem mecânica.
Máquinas simples são dispositivos que podem ser usados para multiplicar ou aumentar uma força que aplicamos — geralmente à custa de uma distância pela qual aplicamos a força. A palavra para “máquina” vem da palavra grega que significa “ajudar a tornar as coisas mais fáceis”. Alavancas, engrenagens, polias, cunhas e parafusos são alguns exemplos de máquinas. A energia ainda é conservada para esses dispositivos porque uma máquina não pode fazer mais trabalho do que a energia investida nela. No entanto, as máquinas podem reduzir a força de entrada necessária para realizar o trabalho. A relação entre as magnitudes da força de saída e de entrada para qualquer máquina simples é chamada de vantagem mecânica (MA).
\[MA = \dfrac{F_o}{F_i}\]
Uma das máquinas mais simples é a alavanca, que é uma barra rígida girada em um local fixo chamado ponto de apoio. Os torques estão envolvidos nas alavancas, pois há rotação em torno de um ponto de articulação. As distâncias do pivô físico da alavanca são cruciais, e podemos obter uma expressão útil para o MA em termos dessas distâncias.
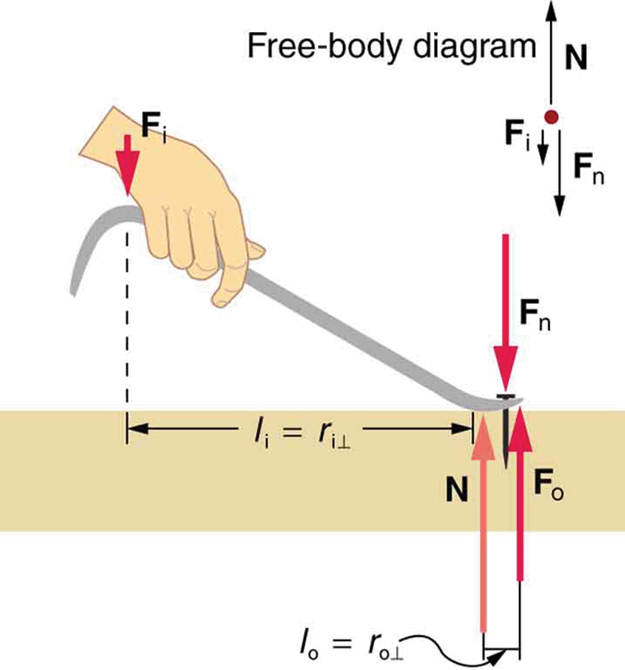
A figura mostra um tipo de alavanca usado como extrator de unhas. Pés de cabra, gangorras e outras alavancas semelhantes são todas análogas a esta\(F_i\) é a força de entrada e\(F_o\) a força de saída. Existem três forças verticais atuando no extrator de pregos (o sistema de interesse) - essas são\(F_i\)\(F_o\), e\(N.\)\(F_n\) é a força de reação de volta ao sistema, igual e oposta\(F_o\) a. (observe que isso não\(F_o\) é uma força no sistema.) \(N\)é a força normal sobre a alavanca e seu torque é zero, pois é exercido no pivô. Os torques devidos\(F_i\) e\(F_n\) devem ser iguais entre si se o prego não estiver se movendo, para satisfazer a segunda condição de equilíbrio\((net \, \tau = 0)\). (Para que o prego realmente se mova, o torque devido\(F_i\) deve ser ligeiramente maior do que o torque devido\(F_n\) a.) Conseqüentemente,
\[l_iF_i = l_oF_o\]onde\(l_i\) e\(l_o\) são as distâncias de onde as forças de entrada e saída são aplicadas ao pivô, conforme mostrado na figura. Reorganizar a última equação dá\[ \dfrac{F_o}{F_i} = \dfrac{l_i}{l_o}.\] O que mais nos interessa aqui é que a magnitude da força exercida pelo puxador de pregos,\(F_o\), é muito maior do que a magnitude da força de entrada aplicada ao extrator na outra extremidade,\(F_i\). Para o extrator de unhas,\[MA = \dfrac{F_o}{F_i} = \dfrac{l_i}{l_o}.\]
Essa equação é verdadeira para alavancas em geral. Para o extrator de unhas, o MA é certamente maior que um. Quanto maior a alça do extrator de unhas, maior a força que você pode exercer com ele.
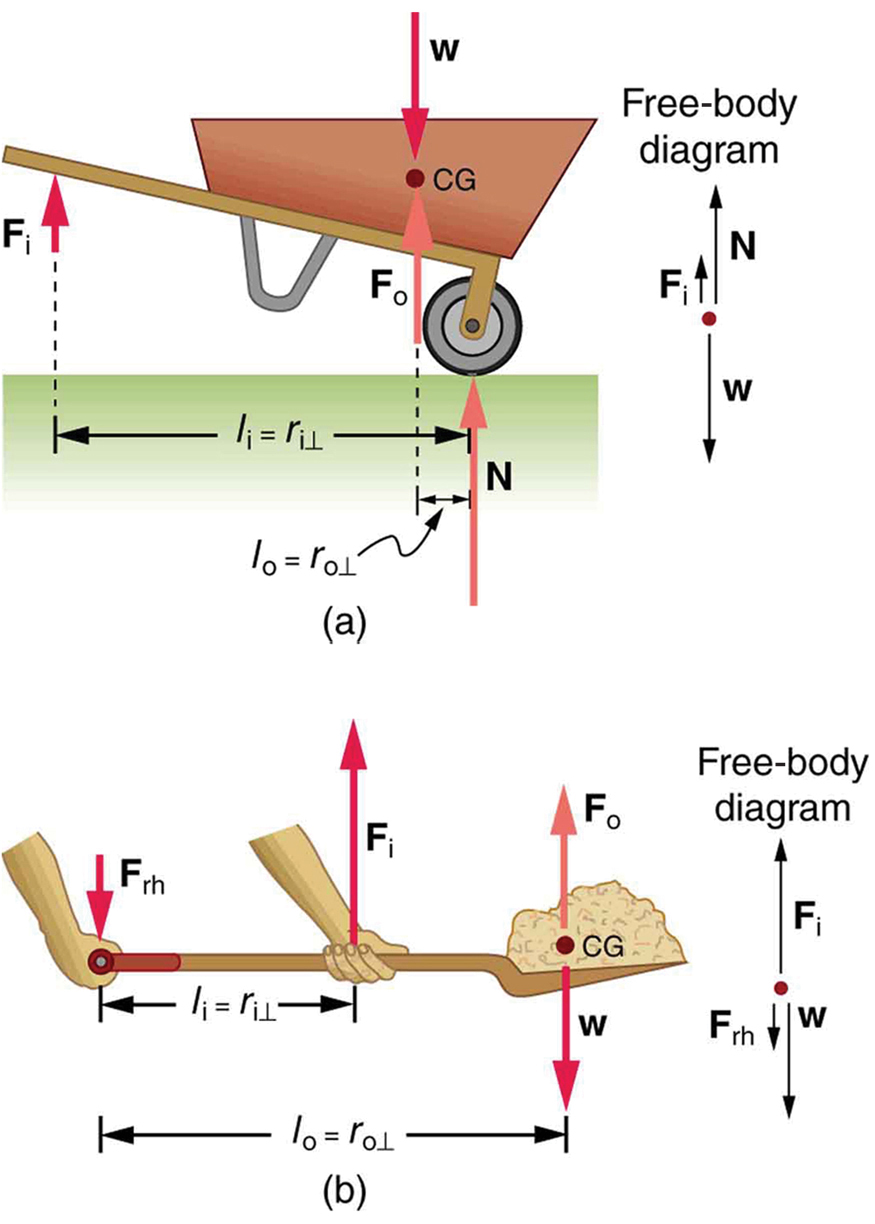
Dois outros tipos de alavancas que diferem ligeiramente do extrator de pregos são um carrinho de mão e uma pá, mostrados na Figura. Todos esses tipos de alavanca são semelhantes, pois apenas três forças estão envolvidas - a força de entrada, a força de saída e a força no pivô - e, portanto, seus MAs são dados por\(MA = \frac{F_o}{F_i} \) e\(MA = \frac{d_1}{d_2}\), com distâncias sendo medidas em relação ao pivô físico. O carrinho de mão e a pá diferem do extrator de pregos porque as forças de entrada e saída estão no mesmo lado do pivô.
No caso do carrinho de mão, a força ou carga de saída está entre o pivô (o eixo da roda) e a força de entrada ou aplicada. No caso da pá, a força de entrada está entre o pivô (na extremidade da alça) e a carga, mas o braço da alavanca de entrada é mais curto que o braço da alavanca de saída. Nesse caso, o MA é menor que um.
Exemplo\(\PageIndex{1}\): What is the Advantage for the Wheelbarrow?
No carrinho de mão da Figura, a carga tem um braço de alavanca perpendicular de 7,50 cm, enquanto as mãos têm um braço de alavanca perpendicular de 1,02 m. (a) Que força ascendente você deve exercer para apoiar o carrinho de mão e sua carga se sua massa combinada for de 45,0 kg? (b) Que força o carrinho de mão exerce no chão?
Estratégia
Aqui, usamos o conceito de vantagem mecânica.
Solução
(a) Neste caso,\(\frac{F_o}{F_i} = \frac{l_i}{l_o}\) torna-se\[F_i = F_o\dfrac{l_o}{l_i},\]
A adição de valores a essa equação gera
\[F_i = (45.0 \, kg)(9.80 \, m/s^2)\dfrac{0.075\space m}{1.02 \, m} = 32.4 \, N.\]
O diagrama de corpo livre (veja a Figura) fornece a seguinte força normal:\[F_i = + N = W.\] Portanto,
\[N = (45.0 \, kg)(9.80 \, m/s^2) - 32.4 \, N = 409 \, N.\]
\(N\)é a força normal atuando na roda; pela terceira lei de Newton, a força que a roda exerce no solo é\(409 \, N\).
Discussão
Uma alça ainda mais longa reduziria a força necessária para levantar a carga. O MA aqui é\(MA = 1.01/0.0750 = 13.6\)
Outra máquina muito simples é o plano inclinado. Empurrar um carrinho para cima de um avião é mais fácil do que levantar o mesmo carrinho diretamente até o topo usando uma escada, porque a força aplicada é menor. No entanto, o trabalho realizado em ambos os casos (supondo que o trabalho realizado por atrito seja insignificante) é o mesmo. As pistas ou rampas inclinadas provavelmente foram usadas durante a construção das pirâmides egípcias para mover grandes blocos de pedra até o topo.
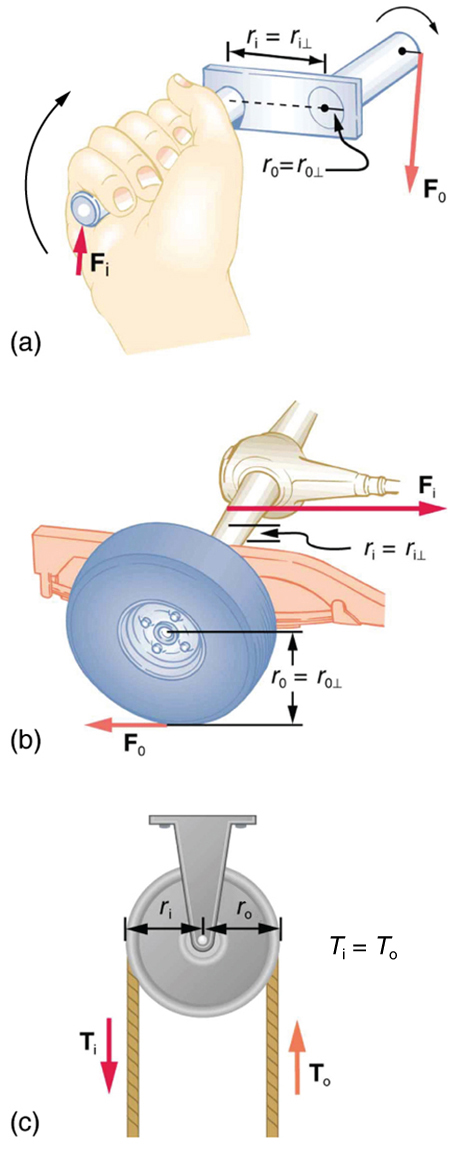
Uma manivela é uma alavanca que pode ser girada em\(360^o\) torno de seu pivô, conforme mostrado na Figura. Essa máquina pode não parecer uma alavanca, mas a física de suas ações permanece a mesma. O MA de uma manivela é simplesmente a proporção dos raios\(r_i/r_o\). Rodas e engrenagens também têm essa expressão simples para seus MAs. O MA pode ser maior que 1, como é para a manivela, ou menor que 1, como é para o eixo simplificado do carro que aciona as rodas, conforme mostrado. Se o raio do eixo for\(2.0 \, cm\) e o raio da roda for\(24.0 \, cm\), então\(MA = 2.0/24.0 = 0.083\) o eixo teria que exercer uma força de\(12,000 \, N\) sobre a roda para permitir que ela exerça uma força de\(1000 \, N\) no solo.
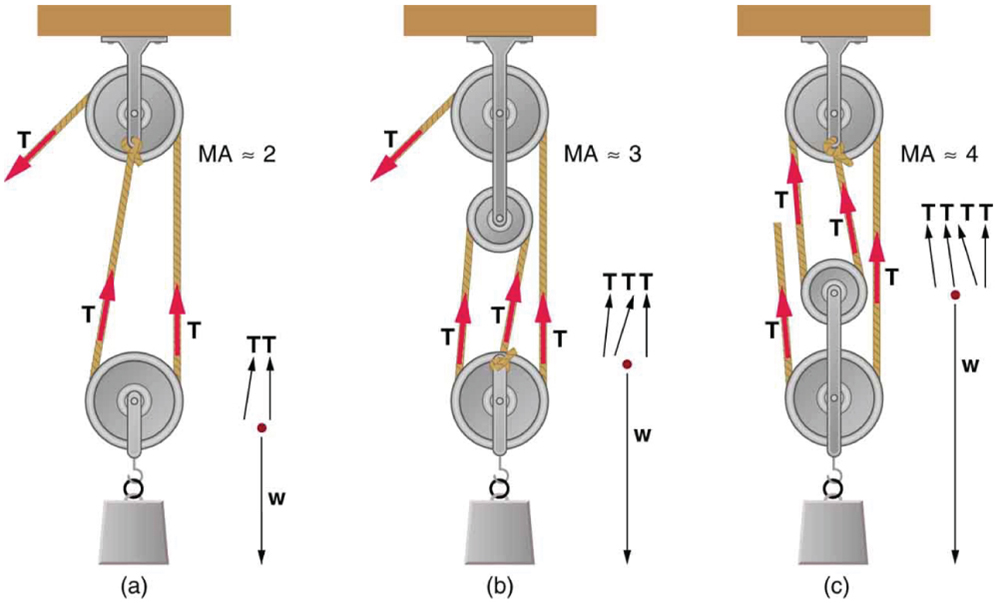
Uma polia comum tem uma MA de 1; ela muda apenas a direção da força e não sua magnitude. Combinações de polias, como as ilustradas na Figura, são usadas para multiplicar a força. Se as polias estiverem livres de atrito, a saída de força é aproximadamente um múltiplo integral da tensão no cabo. O número de cabos puxados diretamente para cima no sistema de interesse, conforme ilustrado nas figuras abaixo, é aproximadamente a MA do sistema de polias. Como cada acessório aplica uma força externa aproximadamente na mesma direção que os outros, eles se somam, produzindo uma força total que é quase um múltiplo integral da força de entrada\(T\).
Resumo
- Máquinas simples são dispositivos que podem ser usados para multiplicar ou aumentar uma força que aplicamos — geralmente à custa de uma distância pela qual temos que aplicar a força.
- A relação entre as forças de saída e entrada para qualquer máquina simples é chamada de vantagem mecânica.
- Algumas máquinas simples são a alavanca, o puxador de pregos, o carrinho de mão, a manivela, etc.
Glossário
- vantagem mecânica
- a relação entre as forças de saída e entrada para qualquer máquina simples