
11.5: 陀螺仪的进动
- Page ID
- 204356

- 描述进动现象背后的物理过程
- 计算陀螺仪的进动角速度
图中\(\PageIndex{1}\)显示了一个陀螺仪,它被定义为旋转盘,其中的旋转轴可以自由地呈现任何方向。 旋转时,自旋轴的方向不受围绕自旋轴的主体方向的影响。 封闭陀螺仪的车身或车辆可以从一个地方移动到另一个地方,旋转轴的方向将保持不变。 这使得陀螺仪在导航中非常有用,尤其是在无法使用磁罗盘的地方,例如载人和无人驾驶航天器、洲际弹道导弹、无人驾驶飞行器和哈勃太空望远镜等卫星。
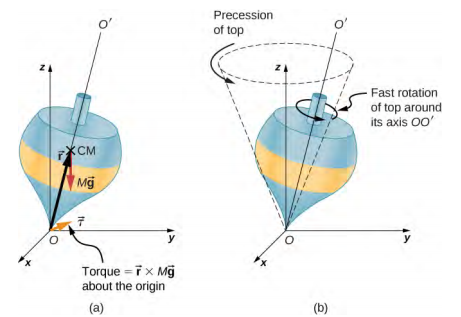
在接下来的两幅图中,我们用顶部的示例来说明陀螺仪的旋转。 如果顶部放置在地球表面附近的平坦表面上,与垂直方向成一定角度,并且没有旋转,它就会掉落,因为重力会产生作用于其质心的扭矩。 如图所示\(\PageIndex{2a}\)。 但是,如果顶部在其轴线上旋转,而不是因为这种扭矩而倾倒,它会绕垂直方向移动,如所示\(\PageIndex{2b}\)。 这是由于质心上的扭矩造成了角动量的变化。
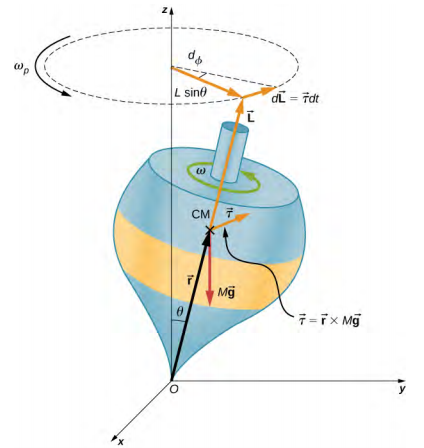
该图\(\PageIndex{3}\)显示了作用在旋转陀螺上的力。 产生的扭矩垂直于角动量矢量。 这会\(\vec{L}\)根据 d\(\vec{L}\) =\(\vec{\tau}\) dt 改变角动量向量的方向,但不会改变其大小。 顶部绕垂直轴移动,因为扭矩始终水平且垂直于\(\vec{L}\)。 如果顶部没有旋转,它会在扭矩方向上获得角动量,然后绕水平轴旋转,像我们预期的那样掉落。
我们可以通过握住旋转的自行车车轮并尝试绕垂直于旋转轴的轴旋转它来亲身体验这种现象。 如图所示\(\PageIndex{4}\),该人施加垂直于旋转轴的力试图旋转车轮,但相反,由于施加的扭矩,轮轴开始向左改变方向。
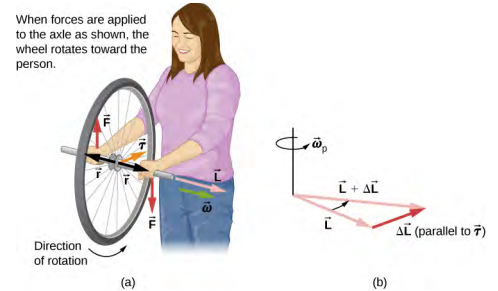
我们都知道自行车在休息时坐在自行车上翻倒是多么容易。 但是,当自行车以良好的速度骑行时,很难将其翻倒,因为我们必须改变旋转车的角动量矢量。
观看这段关于陀螺仪进动的视频,完整演示自行车车轮的进动。
另外,当将旋转的磁盘放入诸如蓝光播放器之类的盒子中时,请尝试将其移动。 向给定方向平移盒子很容易,但很难绕垂直于旋转盘轴线的轴线旋转,因为我们在盒子上施加扭矩,这将导致旋转盘的角动量向量移动。
我们可以在图中计算出顶部的进动率\(\PageIndex{3}\)。 从图\(\PageIndex{3}\)中可以看出,扭矩的大小是
\[\tau = rMg \sin \theta \ldotp\]
因此,
\[dL = rMg \sin \theta dt \ldotp\]
顶部在时间 dt 中穿过的角度为
\[d \phi = \frac{dL}{L \sin \theta} = \frac{rMg \sin \theta}{L \sin \theta} dt = \frac{rMg}{L} dt \ldotp\]
进动角速度是\(\omega_{P} = \frac{d \phi}{dt}\),从这个方程中我们可以看出
\[\omega_{P} = \frac{rMg}{L} \ldotp\]
或者,由于 L = I\(\omega\),
\[\omega_{P} = \frac{rMg}{I \omega} \ldotp \label{11.12}\]
在此推导中,我们假设\(\omega_{P}\) <<\(\omega\),也就是说,进动角速度远小于陀螺盘的角速度。 进动角速度为沿 z 轴的角动量增加了一个很小的分量。 这可以从陀螺仪移动时向上和向下轻微的摆动中看出,被称为 nutation。
地球本身就像一个巨大的陀螺仪。 它的角动量沿其轴线,目前指向北极星北极星。 但是,由于太阳和月亮在其非球形形状上的扭矩,地球正在缓慢前进(大约每26,000年一次)。
陀螺仪的尖端在地面上旋转,旋转时的摩擦阻力可以忽略不计。 陀螺仪的圆盘质量为 0.3 kg,以 20 转/秒的速度旋转。其质心距离枢轴 5.0 cm,圆盘半径为 5.0 cm。 陀螺仪的进动周期是多少?
策略
我们使用方程\ ref {11.12} 来计算陀螺仪的进动角速度。 这使我们能够找到进动时期。
解决方案
磁盘的惯性矩为
\[I = \frac{1}{2} mr^{2} = \frac{1}{2} (0.30\; kg)(0.05\; m)^{2} = 3.75 \times 10^{-4}\; kg\; \cdotp m^{2} \ldotp \nonumber\]
圆盘的角速度为
\[20.0\; rev/s = (20.0)(2 \pi)\; rad/s = 125.66\; rad/s \ldotp \nonumber\]
我们现在可以在方程式\ ref {11.12} 中进行替换。 进动角速度为
\[\omega_{P} = \frac{rMg}{I \omega} = \frac{(0.05\; m)(0.3\; kg)(9.8\; m/s^{2})}{(3.75 \times 10^{-4}\; kg\; \cdotp m^{2})(125.66\; rad/s)} = 3.12\; rad/s \ldotp \nonumber\]
陀螺仪的进动周期是
\[T_{P} = \frac{2 \pi}{3.12\; rad/s} = 2.0\; s \ldotp \nonumber\]
意义
陀螺仪的进动角频率为3.12 rad/s,或大约 0.5 rev/s,远低于陀螺仪盘的角速度 20 rev/s。 因此,我们预计角动量的很大一部分不会由于进动而产生,而方程11.12是进动角速度的良好近似值。
顶部在地球上的进动频率为 5.0 rad/s。 它在月球上的进动频率是多少?