
9.1: A primeira condição para o equilíbrio
- Page ID
- 194946

Objetivos de
Ao final desta seção, você poderá:
- Declare a primeira condição de equilíbrio.
- Explique o equilíbrio estático.
- Explique o equilíbrio dinâmico.
A primeira condição necessária para alcançar o equilíbrio é a já mencionada: a força externa líquida no sistema deve ser zero. Expresso como uma equação, isso é simplesmente
\[net \, F = 0\]
Observe que, se a rede\(F\) for zero, a força externa líquida em qualquer direção será zero. Por exemplo, as forças externas líquidas ao longo dos eixos x e y típicos são zero. Isso é escrito como
\[net \, F_x \, and \, F_y = 0\]
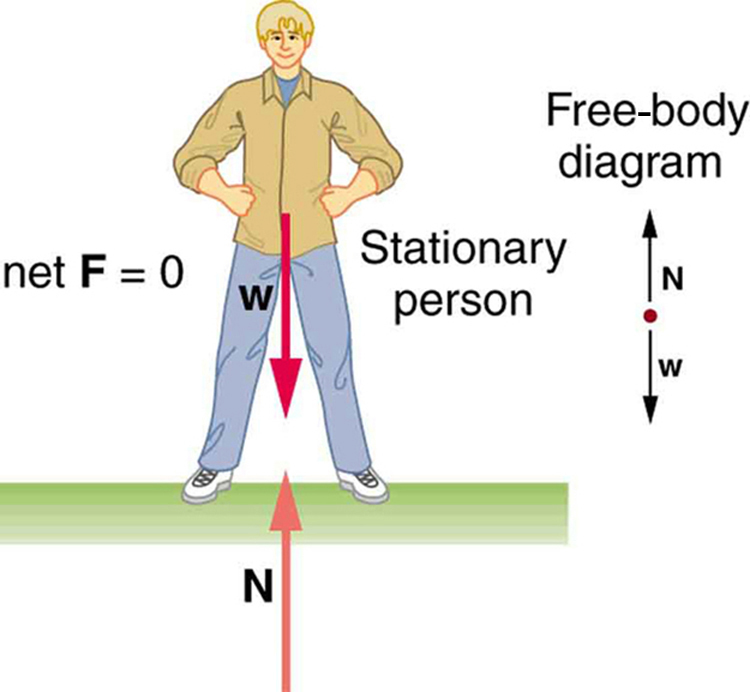
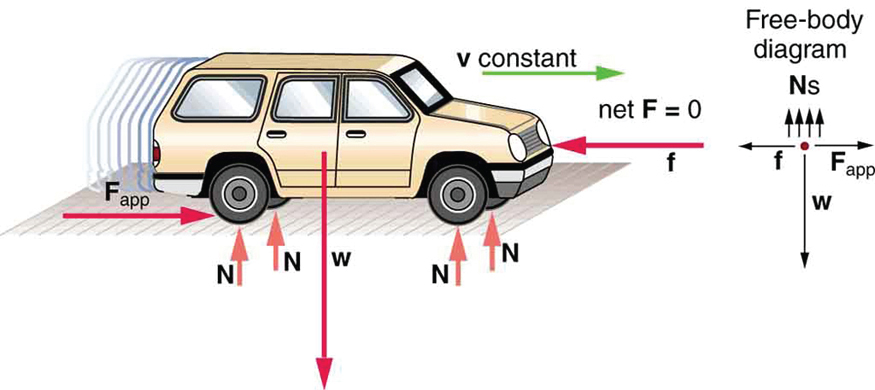
Figure\(\PageIndex{1}\) e\(\PageIndex{2}\) ilustre situações em que, tanto\(net \, F = 0\) para equilíbrio estático (imóvel) quanto para equilíbrio dinâmico (velocidade constante).
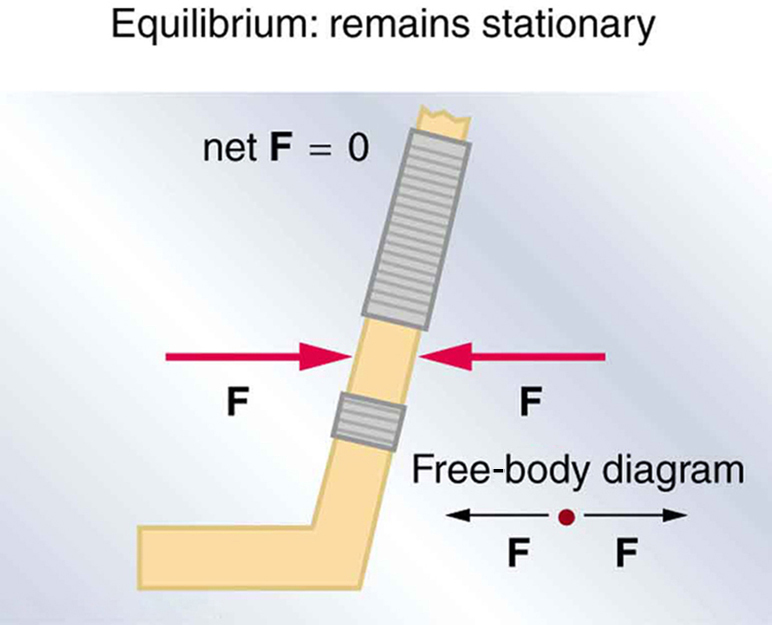
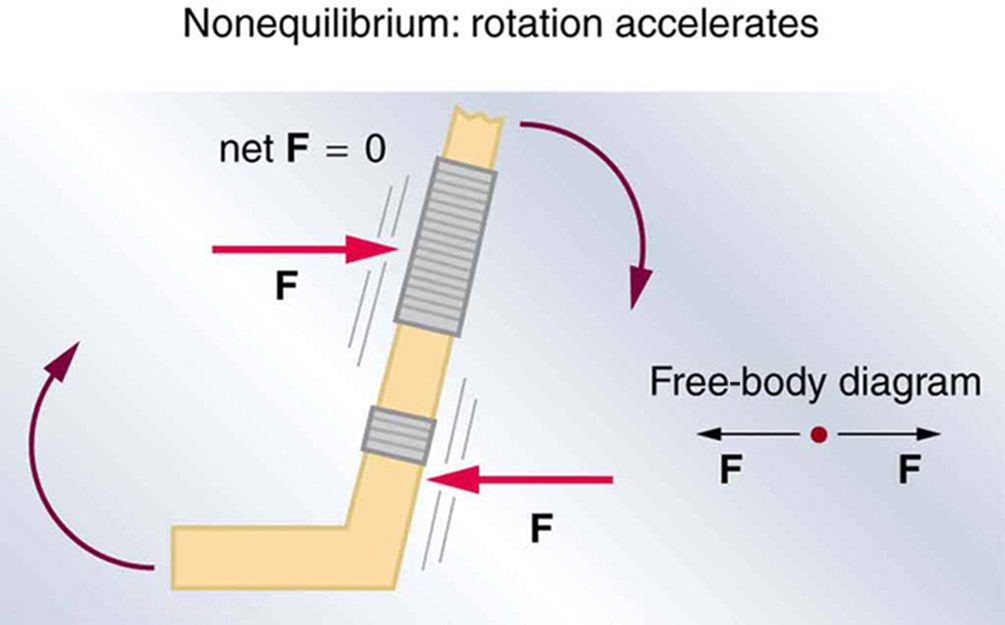
No entanto, não é suficiente que a força externa líquida de um sistema seja zero para que um sistema esteja em equilíbrio. Considere as duas situações ilustradas nas Figuras\(\PageIndex{3}\) e em\(\PageIndex{4}\) que as forças são aplicadas a um taco de hóquei no gelo deitado no gelo. A força externa líquida é zero em ambas as situações mostradas na figura; mas em um caso, o equilíbrio é alcançado, enquanto no outro, não é. Na Figura\(\PageIndex{3}\), o taco de hóquei no gelo permanece imóvel. Mas na Figura\(\PageIndex{4}\), com as mesmas forças aplicadas em lugares diferentes, o manípulo experimenta uma rotação acelerada. Portanto, sabemos que o ponto em que uma força é aplicada é outro fator para determinar se o equilíbrio é alcançado ou não. Isso será explorado mais detalhadamente na próxima seção.
Explorações PhET: Torque
Investigue como o torque faz com que um objeto gire. Descubra as relações entre aceleração angular, momento de inércia, momento angular e torque.
Resumo
- Estática é o estudo das forças em equilíbrio.
- Duas condições devem ser atendidas para alcançar o equilíbrio, que é definido como movimento sem aceleração linear ou rotacional.
- A primeira condição necessária para alcançar o equilíbrio é que a força externa líquida no sistema seja zero, de modo que\(F = 0\).
Glossário
- equilíbrio estático
- um estado de equilíbrio no qual a força externa líquida e o torque atuando em um sistema são zero
- equilíbrio dinâmico
- um estado de equilíbrio no qual a força externa líquida e o torque em um sistema que se move com velocidade constante são zero