
18.10 : Introduction à la rotation à axe fixe
- Page ID
- 191299

Vérifiez votre compréhension
10.1. environ 40,0 tr/min = 2\(pi\) (40,0) rad/s,\(\bar{\alpha} = \frac{\Delta \omega}{\Delta t} = \frac{2 \pi (40.0) − 0\; rad/s}{20.0\; s}\) = 2\(\pi\) (2,0) = 4,0\(\pi\) rad/s 2
b. Comme la vitesse angulaire augmente linéairement, il doit y avoir une accélération constante pendant toute la durée indiquée. Par conséquent, l'accélération angulaire instantanée à tout moment est la solution à 4,0\(\pi\) rad/s 2.
10.2. a. En utilisant l'équation 10.25, nous avons 7 000 tr/min\(\frac{7000.0(2 \pi\; rad)}{60.0\; s}\) = = 733,0 rad/s, $$ \ alpha = \ frac {\ omega - \ omega_ {0}} {t} = \ frac {733,0 \ ; rad/s} {10,0 \ ; s} = 73,3 \ ; rad/s^ {2} \]
b. En utilisant l'équation 10.29, nous avons $$ \ omega^ {2} = \ omega_ {0} ^ {2} + 2 \ alpha \ Delta \ theta \ Rightarrow \ Delta \ theta = \ frac {\ omega^ {2} - \ omega_ {0} ^ {2}} {2 \ alpha} = \ frac {0 - (733,0 \ ; rad/s) {^ {2}} {2 \ alpha} = \ frac {0 - (733,0 \ ; rad/s) {^ 2}} {2 (73,3 \ ; rad/S^ {2})} = 3665,2 \ ; rad \]
10.3. L'accélération angulaire est\(\alpha = \frac{(5.0 − 0)\; rad/s}{20.0\; s}\) = 0,25 rad/s 2. Par conséquent, l'angle total que passe le garçon est de $$ \ Delta \ theta = \ frac {\ omega^ {2} - \ omega_ {0} ^ {2}} {2 \ alpha} = \ frac {(5.0) ^ {2} - 0} {2 (0.25)} = 50 \ ; Rad$$Ainsi, nous calculons $$s = r \ theta = (5,0 \ ; m) (50,0 \ ; rad) = 250,0 \ ; m \]
10.4. L'énergie cinétique de rotation initiale de l'hélice est $$K_ {0} = \ frac {1} {2} I \ omega^ {2} = \ frac {1} {2} (800,0 \ ; kg \ cdotp m^ {2}) (4,0 \ times 2 \ pi \ ; rad/s) ^ {2} = 2,53 \ fois 10^ {5} \ ; J \ LDoS TP$$À 5,0 s, la nouvelle énergie cinétique de rotation de l'hélice est $$K_ {f} = 2,03 \ times 10^ {5} \ ; J \ ldotp$$et le la nouvelle vitesse angulaire est $$ \ omega = \ sqrt {\ frac {2 (2,03 \ times 10^ {5} \ ; J)} {800,0 \ ; kg \ cdotp m^ {2}}} = 22,53 \ ; rad/S$$qui est de 3,58 tr/min.
10,5. I axe parallèle = I centre de masse + md 2 = mR 2 + mR 2 = 2mR 2
10.6. L'angle entre le bras de levier et le vecteur de force est de 80° ; par conséquent, r \(\perp\)= 100 m (sin 80°) = 98,5 m. Le produit transversal\(\vec{\tau} = \vec{r} \times \vec{F}\) donne un couple négatif ou dans le sens des aiguilles d'une montre. Le couple est alors\(\tau = - r_{\perp} F\) = −98,5 m (5,0 x 10 5 N) = −4,9 x 10 7 N • m.
10.7. a. L'accélération angulaire est\(\alpha = \frac{20.0(2 \pi)\; rad/s − 0}{10.0 \; s}\) = 12,56 rad/s 2. En résolvant le couple, nous avons\(\sum_{i} \tau_{i} = I \alpha\) = (30,0 kg • m 2) (12,56 rad/s 2) = 376,80 N • m
b. L'accélération angulaire est\(\alpha = \frac{0 − 20.0(2 \pi)\; rad/s}{20.0\; s}\) = −6,28 rad/s 2. En résolvant le couple, nous avons\(\sum_{i} \tau_{i} = I \alpha\) = (30,0 kg • m 2) (−6,28 rad/s 2) = −188,50 N • m
10.8. 3 MW
Questions conceptuelles
1. L'aiguille des secondes tourne dans le sens des aiguilles d'une montre, donc selon la règle de droite, le vecteur de vitesse angulaire se trouve dans le mur.
3. Ils ont la même vitesse angulaire. Les points situés plus loin sur la batte ont des vitesses tangentielles plus élevées.
5. Ligne droite, linéaire dans le temps, variable
7. Constante
9. Le vecteur d'accélération centripète est perpendiculaire au vecteur vitesse.
11. a. Les deux ; b. accélération centripète non nulle ; c. les deux
13. La sphère creuse, puisque la masse est distribuée plus loin de l'axe de rotation.
15. a. Il diminue. b. Les bras peuvent être rapprochés par des tiges et le disque par un disque. Le torse se trouve près de l'axe de rotation et ne contribue donc pas beaucoup au moment d'inertie.
17. Parce que le moment d'inertie varie comme le carré de la distance par rapport à l'axe de rotation. La masse de la tige située à des distances supérieures à L/2 contribuerait le plus à rendre son moment d'inertie supérieur à la masse ponctuelle à\(\frac{L}{2}\).
19. Ampleur de la force, longueur du bras de levier, angle du bras de levier et vecteur de force
21. Le moment d'inertie des roues étant réduit, un couple plus faible est nécessaire pour les accélérer.
23. Oui
25. |\(\vec{r}\) | peut être égal au bras de levier mais jamais inférieur au bras de levier
27. Si les forces se situent le long de l'axe de rotation, ou si elles ont le même bras de levier et sont appliquées en un point de la tige.
Problèmes
29. \(\omega = \frac{2 \pi\; rad}{45.0\; s}\)= 0,14 rad/s
31. a.\(\theta = \frac{s}{r} = \frac{3.0\; m}{1.5\; m}\) = 2,0 rad
b.\(\omega = \frac{2.0\; rad}{1.0\; s}\) = 2,0 rad/s
c.\(\frac{v^{2}}{r} = \frac{(3.0\; m/s)^{2}}{1.5\; m}\) = 6,0 m/s 2.
33. L'hélice ne prend que\(\Delta\) t\(\frac{\Delta \omega}{\alpha} = \frac{0\; rad/s − 10.0(2 \pi)\; rad/s}{−2.0\; rad/s^{2}}\) = = 31,4 s pour s'immobiliser. Lorsque l'hélice est à 0 rad/s, elle commence à tourner dans la direction opposée. Cela serait impossible en raison de l'ampleur des forces impliquées pour arrêter l'hélice et commencer à tourner dans la direction opposée.
35. a.\(\omega\) = 25,0 (2,0 s) = 50,0 rad/s
b.\(\alpha = \frac{d \omega}{dt}\) = 25,0 rad/s 2
37. a.\(\omega\) = 54,8 rad/s
b. t = 11,0 s
39. environ 0,87 rad/s 2
b.\(\theta\) = 66 264 rad
41. a.\(\omega\) = 42,0 rad/s
b.\(\theta\) = 220 rad
c. v t = 42 m/s, a t = 4,0 m/s 2
43. a.\(\omega\) = 7,0 rad/s
b.\(\theta\) = 22,5 rad
c. a t = 0,1 m/s
45. \(\alpha\)= 28,6 rad/s 2.
47. r = 0,78 m
49. a.\(\alpha\) = −0,314 rad/s 2
b. a c = 197,4 m/s 2
c. a\(\sqrt{a_{c}^{2} + a_{t}^{2}} = \sqrt{197.4^{2} + (−6.28)^{2}}\) = 197,5 m/s 2,\(\theta\) = tan -1\(\frac{−6.28}{197.4}\) = −1,8° dans le sens des aiguilles d'une montre à partir du vecteur d'accélération centripète
51. max = 40,0 kg (5,1 m/s 2) = 204,0 N
La force de friction maximale est\(\mu_{S}\) N = 0,6 (40,0 kg) (9,8 m/s 2) = 235,2 N afin que l'enfant ne tombe pas encore.
53. $$ \ begin {split} v_ {t} & = r \ omega = 1,0 (2,0 t) \ ; m/s \ \ a_ {c} & = \ frac {v_ {t} ^ {2}} {r} = \ frac {(2,0 t) ^ {2}} {1,0 \ ; m} = 4,0 t^ {2} \ ; m/s^ {2} \ \ a_ {t} (t) & = r \ alpha (t) = r \ frac {d \ omega} {dt} = 1,0 \ ; m (2,0) = 2,0 \ ; m/s^ {2} \ ldotp \ end {split} $$Le traçage des deux accélérations donne
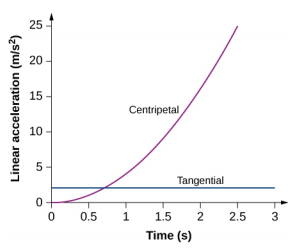
L'accélération tangentielle est constante, tandis que l'accélération centripète dépend du temps et augmente avec le temps pour atteindre des valeurs bien supérieures à l'accélération tangentielle après t = 1s. Pour des durées inférieures à 0,7 s et proches de zéro, l'accélération centripète est bien inférieure à l'accélération tangentielle.
55. a. K = 2,56 x 10 29 J
b. K = 2,68 x 10 33 J
57. K = 434,0 J
59. a. v f = 86,5 m/s
b. La vitesse de rotation de l'hélice reste la même à 20 tr/min.
61. K = 3,95 x 10 42 J
63. a. I = 0,315 kg • m 2
b. K = 621,8 J
65. I =\(\frac{7}{36}\) mL 2
67. v = 7,14 m/s.
69. \(\theta\)= 10,2°
71. F = 30 N
73. environ 0,85 m (55,0 N) = 46,75 N • m
b. Peu importe la hauteur à laquelle vous poussez.
75. m 2\(\frac{4.9\; N \cdotp m}{9.8(0.3\; m)}\) = 1,67 kg
77. \(\tau_{net}\)= −9,0 N • m + 3,46 N • m + 0 − 3,28 N • m = −8,82 N • m
79. \(\tau\)= 5,66 N • m
81. \(\sum \tau\)= 57,82 N • m
83. \(\vec{r} \times \vec{F}\)= 4,0\(\hat{i}\) + 2,0\(\hat{j}\) − 16,0\(\hat{k}\) N • m
85. a.\(\tau\) = (0,280 m) (180,0 N) = 50,4 N • m
b.\(\alpha\) = 17,14 rad/s 2
c.\(\alpha\) = 17,04 rad/s 2
87. \(\tau\)= 8,0 N • m
89. \(\tau\)= −43,6 N • m
91. a.\(\alpha\) = 1,4 x 10 −10 rad/s 2
b.\(\tau\) = 1,36 x 10 28 N • m
c. F = 2,1 x 10 21 N
93. a = 3,6 m/s 2
95. a. a = r\(\alpha\) = 14,7 m/s 2
b. a\(\frac{L}{2} \alpha\) =\(\frac{3}{4}\) g
97. \(\tau = \frac{P}{\omega} = \frac{2.0 \times 10^{6}\; W}{2.1\; rad/s}\)= 9,5 x 10 5 N • m
99. environ K = 888,50 J
b.\(\Delta \theta\) = 294,6 tours
101. a. I = 114,6 kg • m 2
b. P = 104 700 W
103. v = L\(\omega\) =\(\sqrt{3Lg}\)
105. a. a = 5,0 m/s 2
b. W = 1,25 N • m
Problèmes supplémentaires
107. \(\Delta\)t = 10,0 s
109. environ 0,06 rad/s 2
b.\(\theta\) = 105,0 rad
111. s = 405,26 m
113. a. I = 0,363 kg • m 2
b. I = 2,34 kg • m 2
115. \(\omega =\sqrt{\frac{5.36\; J}{4.4\; kg \cdotp m^{2}}}\)= 1,10 rad/s
117. F = 23,3 N
119. \(\alpha = \frac{190.0\; N \cdotp m}{2.94\; kg \cdotp m^{2}}\)= 64,4 rad/s 2
Problèmes liés au défi
121. a.\(\omega\) = 2,0 t − 1,5 t 2
b.\(\theta\) = t 2 − 0,5 t 3
c.\(\theta\) = −400,0 rad
d. le vecteur est à −0,66 (360°) = −237,6°
123. I =\(\frac{2}{5}\) mR 2
125. a.\(\omega\) = 8,2 rad/s
b.\(\omega\) = 8,0 rad/s