
12.4 : Le produit Cross
- Page ID
- 197126

- Calculez le produit croisé de deux vecteurs donnés.
- Utilisez des déterminants pour calculer un produit croisé.
- Trouve un vecteur orthogonal à deux vecteurs donnés.
- Déterminez les surfaces et les volumes à l'aide du produit croisé.
- Calculez le couple d'un vecteur de force et de position donné.
Imaginez un mécanicien qui tourne une clé pour serrer un boulon. Le mécanicien applique une force à l'extrémité de la clé. Cela crée une rotation, ou un couple, qui resserre le boulon. Nous pouvons utiliser des vecteurs pour représenter la force appliquée par le mécanicien et la distance (rayon) entre le boulon et l'extrémité de la clé. Ensuite, nous pouvons représenter le couple par un vecteur orienté le long de l'axe de rotation. Notez que le vecteur de couple est orthogonal à la fois au vecteur de force et au vecteur de rayon.
Dans cette section, nous développons une opération appelée produit croisé, qui nous permet de trouver un vecteur orthogonal à deux vecteurs donnés. Le calcul du couple est une application importante des produits croisés, et nous examinerons le couple plus en détail plus loin dans la section.
Le produit croisé et ses propriétés
Le produit scalaire est une multiplication de deux vecteurs qui donne un scalaire. Dans cette section, nous présentons un produit de deux vecteurs qui génère un troisième vecteur orthogonal aux deux premiers. Réfléchissez à la façon dont nous pourrions trouver un tel vecteur. \(\vecs v=⟨v_1,v_2,v_3⟩\)Soit\(\vecs u=⟨u_1,u_2,u_3⟩\) des vecteurs non nuls. Nous voulons trouver un vecteur\(\vecs w=⟨w_1,w_2,w_3⟩\) orthogonal aux deux\(\vecs u\) et, c'\(\vecs v\)est-à-dire, nous voulons trouver un vecteur\(\vecs w\) tel que\(\vecs u ⋅ \vecs w=0\) et\( \vecs v⋅ \vecs w=0\). Par conséquent\(w_1\),\(w_2,\) et\(w_3\) doit satisfaire
\[u_1w_1+u_2w_2+u_3w_3=0 \label{eq1} \]
\[v_1w_1+v_2w_2+v_3w_3=0. \label{eq2} \]
Si nous multiplions l'équation du haut par\(v_3\) et l'équation du bas par\(u_3\) et que nous soustrayons, nous pouvons éliminer la variable\(w_3\), qui donne
\[(u_1v_3−v_1u_3)w_1+(u_2v_3−v_2u_3)w_2=0. \nonumber \]
Si nous sélectionnons
\[\begin{align*} w_1 &=u_2v_3−u_3v_2 \\[4pt] w_2 &=−(u_1v_3−u_3v_1), \end{align*}\]
nous obtenons un vecteur de solution possible. La substitution de ces valeurs dans les équations d'origine (équations \ ref {eq1} et \ ref {eq2}) donne
\[w_3=u_1v_2−u_2v_1. \nonumber \]
C'est-à-dire un vecteur
\[\vecs w=⟨u_2v_3−u_3v_2,−(u_1v_3−u_3v_1),u_1v_2−u_2v_1⟩ \nonumber \]
est orthogonal aux deux\(\vecs u\) et\(\vecs v\), ce qui nous amène à définir l'opération suivante, appelée produit croisé.
\(\vecs u=⟨u_1,u_2,u_3⟩\)Let and\(\vecs v=⟨v_1,v_2,v_3⟩.\) Then, le produit croisé\(\vecs u×\vecs v\) est un vecteur
\[\begin{align} \vecs u×\vecs v &= (u_2v_3−u_3v_2)\mathbf{\hat i}−(u_1v_3−u_3v_1) \mathbf{\hat j}+(u_1v_2−u_2v_1)\mathbf{\hat k} \nonumber \\[4pt] &=⟨u_2v_3−u_3v_2,−(u_1v_3−u_3v_1),u_1v_2−u_2v_1⟩. \label{cross}\end{align} \]
D'après la façon dont nous avons développé\(\vecs u×\vecs v\), il devrait être clair que le produit croisé est orthogonal à la fois à\(\vecs u\) et\(\vecs v\). Cependant, cela ne fait jamais de mal de vérifier. Pour montrer que\(\vecs u×\vecs v\) c'est orthogonal à\(\vecs u\), nous calculons le produit scalaire de\(\vecs u\) et\(\vecs u×\vecs v\).
\ [\ begin {align*} \ vecs u⋅ (\ vecs u× \ vecs v) &=rq_u_1, u_2, u_3·⋅rq−u_2v_3−u_3v_2, −u_1v_3+u_3v_1, u_1v_2−u_2v_1⟩ \ \ [4pt] &=u_1 (u_2v_1⟩ \ \ [4pt] &=u_1 (u_2v_1⟩ \ \ [4pt] _3−u_3v_2) +u_2 (−u_1v_3+u_3v_1) +u_3 (u_1v_2−u_2v_1) \ \ [4 points]
&=u_1u_2v_3−u_1u_3v_2−u_2−u_3v_3+u_2u_3v_1+u_1u_3v_2−u_3v_1+u_1u_3v_2−u_3v_1 _2−u_2u_3v_1 \ \ [4 points]
& =( u_1u_2v_3−u_1u_2) v_3) + (−u_1u_3v_2+u_1u_3v_2) + (u_2u_3v_1−u_2u_3v_1) \ \ [4 points]
&= 0 \ end {align*} \]
De la même manière, nous pouvons montrer que le produit croisé est également orthogonal à\(\vecs v\).
Laissons\(\vecs p=⟨−1,2,5⟩\) et\(\vecs q=⟨4,0,−3⟩\) (Figure\(\PageIndex{1}\)). Trouve\(\vecs p×\vecs q\).
Solution
Substituez les composantes des vecteurs dans l'équation \ ref {cross} :
\[\begin{align*} \vecs p×\vecs q &=⟨−1,2,5⟩×⟨4,0,−3⟩ \\[4pt] &= ⟨p_2q_3−p_3q_2,-(p_1q_3−p_3q_1),p_1q_2−p_2q_1⟩ \\[4pt] &= ⟨2(−3)−5(0),−(−1)(−3)+5(4),(−1)(0)−2(4)⟩ \\[4pt] &= ⟨−6,17,−8⟩.\end{align*}\]
\(\vecs p×\vecs q\)Recherchez\(\vecs p=⟨5,1,2⟩\) et\(\vecs q=⟨−2,0,1⟩.\) exprimez la réponse à l'aide de vecteurs unitaires standard.
- Allusion
-
Utilisez la formule\(\vecs u×\vecs v=(u_2v_3−u_3v_2)\mathbf{\hat i}−(u_1v_3−u_3v_1)\mathbf{\hat j}+(u_1v_2−u_2v_1)\mathbf{\hat k}.\)
- Réponse
-
\(\vecs p×\vecs q = \mathbf{\hat i}−9\mathbf{\hat j}+2\mathbf{\hat k}\)
Bien que cela ne soit pas évident à partir de l'équation \ ref {cross}, la direction de\(\vecs u×\vecs v\) est donnée par la règle de droite. Si nous tenons la main droite avec les doigts pointés dans la direction de\(\vecs u\), puis que nous courbons les doigts vers le vecteur\(\vecs v\), le pouce pointe dans la direction du produit croisé, comme indiqué sur la figure\(\PageIndex{2}\).
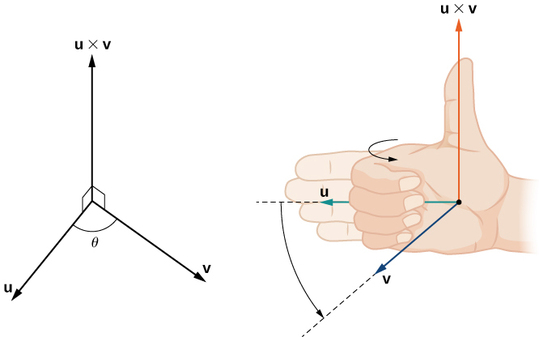
Remarquez ce que cela signifie pour la direction de\(\vecs v×\vecs u\). Si nous appliquons la règle de la main droite à\(\vecs v×\vecs u\), nous commençons avec nos doigts pointés dans la direction de\(\vecs v\), puis nous courbons nos doigts vers le vecteur\(\vecs u\). Dans ce cas, le pouce pointe dans la direction opposée à\(\vecs u×\vecs v\). (Essayez-le !)
Laissez\(\vecs u=⟨0,2,1⟩\) et\(\vecs v=⟨3,−1,0⟩\). \(\vecs u×\vecs v\)Calculez-les\(\vecs v×\vecs u\) et graphiez-les.
Solution
Nous avons
\(\vecs u×\vecs v=⟨(0+1),−(0−3),(0−6)⟩=⟨1,3,−6⟩\)
\(\vecs v×\vecs u=⟨(−1−0),−(3−0),(6−0)⟩=⟨−1,−3,6⟩.\)
Nous le voyons, dans ce cas,\(\vecs u×\vecs v=−(\vecs v×\vecs u)\) (Figure\(\PageIndex{4}\)). Nous le prouvons en général plus loin dans cette section.
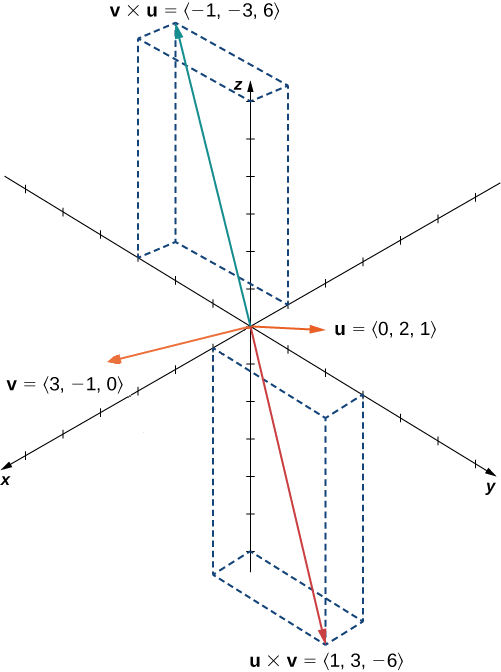
Figure\(\PageIndex{4}\) : Les produits croisés\(\vecs{u}×\vecs{v}\) et\(\vecs{v}×\vecs{u}\) sont tous deux orthogonaux à\(\vecs{u}\) et\(\vecs{v}\), mais dans des directions opposées.
Supposons que\(\vecs u\) des vecteurs\(\vecs v\) se trouvent dans le\(xy\) plan\(z\) -plane (la composante -de chaque vecteur est zéro). Supposons maintenant que les\(y\) composantes\(x\) - et -de\(\vecs u\) et la\(y\) composante -de\(\vecs v\) sont toutes positives, alors que la\(x\) composante -de\(\vecs v\) est négative. En supposant que les axes de coordonnées sont orientés dans les positions habituelles, dans quelle direction\(\vecs u×\vecs v\) pointent-ils ?
- Allusion
-
N'oubliez pas la règle de la main droite (Figure\(\PageIndex{2}\)).
- Réponse
-
Vers le haut (\(z\)direction positive)
Les produits croisés des vecteurs unitaires standard\(\mathbf{\hat i}\)\(\mathbf{\hat j}\), et\(\mathbf{\hat k}\) peuvent être utiles pour simplifier certains calculs. Examinons donc ces produits croisés. Une simple application de la définition montre que
\[\mathbf{\hat i}×\mathbf{\hat i}=\mathbf{\hat j}×\mathbf{\hat j}=\mathbf{\hat k}×\mathbf{\hat k}=\vecs 0. \nonumber \]
(Le produit croisé de deux vecteurs est un vecteur, donc chacun de ces produits donne le vecteur zéro, et non le scalaire\(0\).) C'est à vous de vérifier vous-même les calculs.
De plus, comme le produit croisé de deux vecteurs est orthogonal à chacun de ces vecteurs, nous savons que le produit croisé de\(\mathbf{\hat i}\) et\(\mathbf{\hat j}\) est parallèle à\(\mathbf{\hat k}\). De même, le produit vectoriel de\(\mathbf{\hat i}\) et\(\mathbf{\hat k}\) est parallèle à\(\mathbf{\hat j}\), et le produit vectoriel de\(\mathbf{\hat j}\) et\(\mathbf{\hat k}\) est parallèle à\(\mathbf{\hat i}\).
Nous pouvons utiliser la règle de la main droite pour déterminer la direction de chaque produit. Ensuite, nous avons
\ [\ begin {align*} \ mathbf {\ hat i} × \ mathbf {\ hat j} &= \ mathbf {\ hat k} \ \ [4pt]
\ mathbf {\ hat j} × \ mathbf {\ hat i} &=− \ mathbf {\ hat k} \ \ [10 points]
\ mathbf {\ hat j} × \ mathbf {\ hat k} &= \ mathbf {\ hat i} \ \ [4pt]
\ mathbf {\ hat k} × \ mathbf {\ hat j} &=− \ mathbf {\ hat i} \ \ [10 pt]
\ mathbf {\ hat k} × \ mathbf {\ hat i} &= \ mathbf {\ hat j} \ \ [4 points]
\ mathbf {\ hat i} × \ mathbf {\ hat k} &=− \ mathbf {\ hat j}. \ end {align*} \]
Ces formules seront utiles plus tard.
Trouve\(\mathbf{\hat i} ×(\mathbf{\hat j}×\mathbf{\hat k})\).
Solution
Nous le savons\(\mathbf{\hat j}×\mathbf{\hat k}=\mathbf{\hat i}\). Par conséquent,\(\mathbf{\hat i}×(\mathbf{\hat j}×\mathbf{\hat k})=\mathbf{\hat i}×\mathbf{\hat i}=\vecs 0.\)
Trouvez\((\mathbf{\hat i}×\mathbf{\hat j})×(\mathbf{\hat k}×\mathbf{\hat i}).\)
- Allusion
-
N'oubliez pas la règle de la main droite (Figure\(\PageIndex{2}\)).
- Réponse
-
\(−\mathbf{\hat i}\)
Comme nous l'avons vu, le produit scalaire est souvent appelé produit scalaire car il donne un scalaire. Le produit croisé donne un vecteur, c'est pourquoi il est parfois appelé produit vectoriel. Ces opérations sont toutes deux des versions de la multiplication vectorielle, mais elles ont des propriétés et des applications très différentes. Explorons certaines propriétés du produit croisé. Nous n'en prouvons que quelques-unes. Les preuves des autres propriétés sont laissées sous forme d'exercices.
\(\vecs w\)Soyons\(\vecs u,\vecs v,\) des vecteurs dans l'espace, et\(c\) soyons un scalaire.
- Propriété anticommutative :\[\vecs u×\vecs v=−(\vecs v×\vecs u) \nonumber \]
- Propriété distributive :\[\vecs u×(\vecs v+\vecs w)=\vecs u×\vecs v+\vecs u×\vecs w \nonumber \]
- Multiplication par une constante :\[c(\vecs u×\vecs v)=(c\vecs u)×\vecs v=\vecs u×(c\vecs v) \nonumber \]
- Produit croisé du vecteur zéro :\[\vecs u×\vecs 0=\vecs 0×\vecs u=\vecs 0 \nonumber \]
- Produit croisé d'un vecteur avec lui-même :\[\vecs v×\vecs v=\vecs 0 \nonumber \]
- Produit triple scalaire :\[\vecs u⋅(\vecs v×\vecs w)=(\vecs u×\vecs v)⋅\vecs w \nonumber \]
Pour la propriété\(i\), nous voulons montrer que\(\vecs u×\vecs v=−(\vecs v×\vecs u).\) nous avons
\[\begin{align*} \vecs u×\vecs v &=⟨u_1,u_2,u_3⟩×⟨v_1,v_2,v_3⟩ \\[4pt] &=⟨u_2v_3−u_3v_2,−u_1v_3+u_3v_1,u_1v_2−u_2v_1⟩ \\[4pt] &=−⟨u_3v_2−u_2v_3,−u_3v_1+u_1v_3,u_2v_1−u_1v_2⟩ \\[4pt] &=−⟨v_1,v_2,v_3⟩×⟨u_1,u_2,u_3⟩\\[4pt] &=−(\vecs v×\vecs u).\end{align*}\]
Contrairement à la plupart des opérations que nous avons vues, le produit croisé n'est pas commutatif. Cela a du sens si l'on pense à la règle de la main droite.
Pour la propriété\(iv\), cela découle directement de la définition du produit croisé. Nous avons
\[\vecs u × \vecs 0=⟨u_2(0)−u_3(0),−(u_1(0)−u_3(0)),u_1(0)−u_2(0)⟩=⟨0,0,0⟩=\vecs 0. \nonumber \]
Ensuite, par propriété i.,\(\vecs 0×\vecs u=\vecs 0\) également. N'oubliez pas que le produit scalaire d'un vecteur et du vecteur zéro est le scalaire\(0\), alors que le produit croisé d'un vecteur avec le vecteur zéro est le vecteur\(\vecs 0\).
Propriété\(vi\). ressemble à la propriété associative, mais notez la modification des opérations :
\ [\ begin {align*} \ vecs u⋅ (\ vecs v× \ vecs w) &=u⋅105/v_2w_3−v_3w_2, −v_1w_3+v_3w_1, v_1w_2−v_2w_1⟩ \ \ [4 points]
&= u_1 (v_2w_3−v_3w_2) +u_1 _2 (−v_1w_3+v_3w_1) +u_3 (v_1w_2−v_2w_1) \ \ [4 points]
&=u_1v_2w_3−u_1v_3w_3−u_2−u_2v_1w_3+u_2v_3w_1+u_3v_1w_2−u_3v_2w_2_w_1 \ \ [4 points]
et =( u_2v_3−u_3v) _2) w_1+ (u_3v_1−u_1v_3) w_2+ (u_1v_2−u_2v_1) w_3 \ \ [4 points]
&=u_2v_3−u_3v_2, u_3v_1−u_1v_3, u_1v_2−u_2−u_2v_1−u_3−u_3v_2, w_1 3⟩ =( \ vecs u× \ vecs v) ⋅ \ vecs w. \ end {align*} \]
\(\square\)
Utilisez les propriétés croisées des produits pour calculer\((2\mathbf{\hat i}×3\mathbf{\hat j})×\mathbf{\hat j}.\)
Solution
\ [\ begin {align*} (2 \ mathbf {\ hat i} ×3 \ mathbf {\ hat j}) × \ mathbf {\ hat j} &=2 (\ mathbf {\ hat i} ×3 \ mathbf {\ hat j}) × \ mathbf {\ hat j} \ \ [4pt] &=2 (3) (\ mathbf {\ hat j} \ [4pt]
&=2 (3) (\ mathbf {\ hat j} hat i} × \ mathbf {\ hat j}) × \ mathbf {\ hat j} \ \ [4 points]
& =( 6 \ mathbf {\ hat k}) × \ mathbf {\ hat j} \ \ [4 points]
&=6 (\ mathbf { \ hat k} × \ mathbf {\ hat j}) \ \ [4pt]
&=6 (− \ mathbf {\ hat i}) =−6 \ mathbf {\ hat i}. \ end {align*} \]
Utilisez les propriétés du produit croisé pour calculer\((\mathbf{\hat i}×\mathbf{\hat k})×(\mathbf{\hat k}×\mathbf{\hat j}).\)
- Allusion
-
\(\vecs u×\vecs v=−(\vecs v×\vecs u)\)
- Réponse
-
\(−\mathbf{\hat k}\)
Jusqu'à présent, dans cette section, nous nous sommes intéressés à la direction du vecteur\(\vecs u×\vecs v\), mais nous n'avons pas discuté de sa magnitude. Il s'avère qu'il existe une expression simple pour désigner l'ampleur de l'\(\vecs u×\vecs v\)implication des magnitudes de\(\vecs u\) et\(\vecs v\) et du sinus de l'angle qui les sépare.
Soyons\(\vecs u\)\(\vecs v\) des vecteurs, et\(θ\) que ce soit l'angle entre eux. Ensuite,\(‖\vecs u×\vecs v‖=‖\vecs u‖⋅‖\vecs v‖⋅\sin θ.\)
\(\vecs v=⟨v_1,v_2,v_3⟩\)Soit\(\vecs u=⟨u_1,u_2,u_3⟩\) des vecteurs, et\(θ\) notons l'angle qui les sépare. Alors
\ [\ begin {align*} « \ vecs u× \ vecs v^2 &= (u_2v_3−u_3v_2) ^2+ (u_3v_1−u_1v_3) ^2+ (u_1v_2−u_2v_1) ^2 \ \ [4 points]
&=u^2_2_2v^2_3−2u_2_u_2_u_u_2_u_u_2_u_u_u_2_u_u_u_u_2_u_u_u_2_u_u_3v_2v_3+u^2_3v^2_2+u^2_3v^2_1−2u_1u_3v_1v_3+u^2_1v^2_3+u^2_1v^2_2−2u_1u_2v_1v_2+u^2_2v^2_2_2_2_2_1 \ \ [4 points] &=u2^2_2_v^2_2_1 \ [4 points]
&=u2_1v_1v_2_1 \ \ [4 points] &=u2^v^2_1+u^2_1v^2_2+u^2_1v^2_3+u^2_2_2_1+u^2_2_2_2v ^2_2+u^2_2v^2_3+u^2_3v^2_1+u^2_3v^2_2+u^2_3v^2_3− (u^2_1v^2_2_2_v^2_2_2+u^2_3v^2_3+2u_1u_2v_1v_2+2u_1v_2+2u_1v_2+2u_1v_2+2u_1v_2+2u_1v_2+2u_1v_2+2u_1v_2+u_3v_1v_3+2u_2u_3v_2v_3) \ \ [4 points]
et =( u^2_1+u^2_2+u^2_2+u^2_3) (v^2_1+v^2_3) − (u_1v_1+u_2v_2+u_3v_3) ^2 \ \ [4pt]
&=⟩ \ vecs u^2 \ vecs v^2− (\ vecs u⋅ \ vecs v) ^2 \ \ [4 points]
&=⟩ \ vecs u^2 \ vecs v^2−− \ vecs u^2 \ vecs v^2 \ cos^2θ \ \ [4 points]
&=\ vecs u^2 \ vecs v^2 (1− \ cos^2θ) \ \ [4 points]
&=) \ \ vecs u^2 \ vecs v^2 ^2 (\ sin^2θ). \ end {align*} \ nonumber \]
En prenant des racines carrées et en constatant que\(\sqrt{\sin^2θ}=\sinθ\)\(0≤θ≤180°,\) nous avons le résultat souhaité :
\[‖\vecs u×\vecs v‖=‖\vecs u‖‖\vecs v‖ \sin θ. \nonumber \]
□
Cette définition du produit croisé nous permet de visualiser ou d'interpréter le produit de manière géométrique. Il est clair, par exemple, que le produit croisé n'est défini que pour les vecteurs en trois dimensions, et non pour les vecteurs en deux dimensions. En deux dimensions, il est impossible de générer un vecteur simultanément orthogonal à deux vecteurs non parallèles.
Utilisez « Magnitude du produit croisé » pour déterminer l'amplitude du produit croisé de\(\vecs u=⟨0,4,0⟩\) et\(\vecs v=⟨0,0,−3⟩\).
Solution
Nous avons
\ [\ begin {align*} ⟩ \ vecs u× \ vecs v^= {\ vecs u⋅ \ vecs v⋅ \ sinθ \ \ [4 points]
&= \ sqrt {0^2+4^2+0^2} ⋅ \ sqrt {0^2+0^2+ (−3) ^2} ⋅ \ sin {\ dfrac {π} {2}} \ \ [4 points]
&=4 (3) (1) =12 \ end {align*} \]
Utilisez « Magnitude du produit croisé » pour déterminer l'amplitude de\(\vecs u×\vecs v\), où\(\vecs u=⟨−8,0,0⟩\) et\(\vecs v=⟨0,2,0⟩\).
- Allusion
-
Les vecteurs\(\vecs u\) et\(\vecs v\) sont orthogonaux.
- Réponse
-
16
Déterminants et produit croisé
L'utilisation de l'équation \ ref {cross} pour trouver le produit croisé de deux vecteurs est simple, et elle présente le produit croisé sous la forme d'un composant utile. La formule est toutefois complexe et difficile à retenir. Heureusement, nous avons une alternative. Nous pouvons calculer le produit croisé de deux vecteurs en utilisant la notation déterminante.
Un\(2×2\) déterminant est défini par
\[\begin{vmatrix}a_1 & b_1\\a_2 & b_2\end{vmatrix} =a_1b_2−b_1a_2. \nonumber \]
Par exemple,
\[\begin{vmatrix}3 & −2\\5 & 1\end{vmatrix} =3(1)−5(−2)=3+10=13. \nonumber \]
Un\(3×3\) déterminant est défini en termes de\(2×2\) déterminants comme suit :
\[\begin{vmatrix}a_1 & a_2 & a_3\\b_1 & b_2 & b_3\\c_1 & c_2 & c_3\end{vmatrix}=a_1\begin{vmatrix}b_2 & b_3\\c_2 & c_3\end{vmatrix}−a_2\begin{vmatrix}b_1 & b_3\\c_1 & c_3\end{vmatrix}+a_3\begin{vmatrix}b_1 & b_2\\c_1 & c_2\end{vmatrix}.\label{expandEqn} \]
L'équation \ ref {ExpandeQn} est appelée expansion du déterminant le long de la première ligne. Notez que les multiplicateurs de chacun des\(2×2\) déterminants sur le côté droit de cette expression sont les entrées de la première ligne du\(3×3\) déterminant. En outre, chacun des\(2×2\) déterminants contient les entrées du\(3×3\) déterminant qui resteraient si vous barriez la ligne et la colonne contenant le multiplicateur. Ainsi, pour le premier terme à droite,\(a_1\) se trouve le multiplicateur, et le\(2×2\) déterminant contient les entrées qui restent si vous supprimez la première ligne et la première colonne du\(3×3\) déterminant. De même, pour le second terme, le multiplicateur est\(a_2\), et le\(2×2\) déterminant contient les entrées qui restent si vous barrez la première ligne et la deuxième colonne du\(3×3\) déterminant. Notez cependant que le coefficient du second terme est négatif. Le troisième terme peut être calculé de la même manière.
Évaluez le déterminant\(\begin{vmatrix}2 & 5 &−1\\−1 & 1 & 3\\−2 & 3 & 4\end{vmatrix}\).
Solution
Nous avons
\ [\ begin {align*} \ begin {vmatrix} 2 et 5 et −1 \ \ −1 et 1 et 3 \ \ −2 et 3 et 4 \ end {vmatrix} &=2 \ begin {vmatrix} 1 et 3 \ \ 3 et 4 \ end {vmatrix} −5 \ begin {vmatrix} −1 et 3 \ \ −2 et 4 \ end {vmatrix} −1 \ begin {vmatrix} −1 \ begin {vmatrix} −5 \ begin {vmatrix} −1 \ begin {vmatrix} matrix} −1 et 1 \ \ −2 et 3 \ end {vmatrix} \ \ [4 points]
&=2 (4−9) −5 (−4+6) −1 (−3+2) ) \ \ [4 points]
&= 2 (−5) −5 (2) −1 (−1) =−10−10+1 \ \ [4 points]
&=−19 \ end {align*} \]
Évaluez le déterminant\(\begin{vmatrix}1 & −2 & −1\\3 & 2 & −3\\1 & 5 & 4\end{vmatrix}\).
- Allusion
-
Développez le long de la première rangée. N'oubliez pas que le second terme est négatif !
- Réponse
-
40
Techniquement, les déterminants sont définis uniquement en termes de tableaux de nombres réels. Cependant, la notation déterminante fournit un dispositif mnémotechnique utile pour la formule des produits croisés.
Laissez\(\vecs u=⟨u_1,u_2,u_3⟩\) et\(\vecs v=⟨v_1,v_2,v_3⟩\) soyez des vecteurs. Ensuite, le produit croisé\(\vecs u×\vecs v\) est donné par
\[\vecs u×\vecs v=\begin{vmatrix}\mathbf{\hat i} & \mathbf{\hat j} & \mathbf{\hat k}\\u_1 & u_2 & u_3\\v_1 & v_2 & v_3\end{vmatrix}=\begin{vmatrix}u_2 & u_3\\v_2 & v_3\end{vmatrix}\mathbf{\hat i}−\begin{vmatrix}u_1 & u_3\\v_1 & v_3\end{vmatrix}\mathbf{\hat j}+\begin{vmatrix}u_1 & u_2\\v_1 & v_2\end{vmatrix}\mathbf{\hat k}. \nonumber \]
Laissez\(\vecs p=⟨−1,2,5⟩\) et\(\vecs q=⟨4,0,−3⟩\). Trouve\(\vecs p×\vecs q\).
Solution
Nous définissons notre déterminant en plaçant les vecteurs unitaires standard sur la première ligne, les composantes de\(\vecs u\) la deuxième rangée et les composantes\(\vecs v\) de la troisième rangée. Ensuite, nous avons
\ [\ begin {align*} \ vecs p× \ vecs q &= \ begin {vmatrix} \ mathbf {\ hat i} & \ mathbf {\ hat j} & \ mathbf {\ hat k} \ \ -1 et 2 et 5 \ \ 4 et 0 et −3 \ end {vmatrix} = \ begin {vmatrix} 2 et 5 \ \ 0 et −3 \ {end vmatrix} \ mathbf {\ hat i} − \ begin {vmatrix} −1 et 5 \ \ 4 et −3 \ end {vmatrix} \ mathbf {\ hat j} + \ begin {vmatrix} − 1 et 2 \ \ 4 et 0 \ end {vmatrix} \ mathbf {\ hat k} \ \ [4 points]
&= (−6−0) \ mathbf {\ hat i} − (3−20) \ mathbf {\ hat j} + (0−8) \ mathbf {\ hat k} \ \ [4 points]
&=−6 \ mathbf {\ hat i} +17 \ mathbf {\ hat j} −8 \ mathbf {\ hat k}. \ end {align*} \]
Notez que cette réponse confirme le calcul du produit croisé dans Example\(\PageIndex{1}\).
Utilisez la notation déterminante pour trouver\(\vecs a×\vecs b\), où\(\vecs a=⟨8,2,3⟩\) et\(\vecs b=⟨−1,0,4⟩.\)
- Allusion
-
Calculez le déterminant\(\begin{vmatrix}\mathbf{\hat i} \mathbf{\hat j} \mathbf{\hat k}\\8 & 2 & 3\\−1 & 0 & 4\end{vmatrix}\).
- Réponse
-
\(\vecs a×\vecs b = 8\mathbf{\hat i}−35\mathbf{\hat j}+2\mathbf{\hat k}\)
Utilisation du produit Cross
Le produit croisé est très utile pour plusieurs types de calculs, y compris la recherche d'un vecteur orthogonal à deux vecteurs donnés, le calcul des zones de triangles et de parallélogrammes, et même la détermination du volume de la forme géométrique tridimensionnelle constituée de parallélogrammes appelés parallélépipèdes. Les exemples suivants illustrent ces calculs.
Laissez\(\vecs a=⟨5,2,−1⟩\) et\(\vecs b=⟨0,−1,4⟩\). Trouvez un vecteur unitaire orthogonal à la fois à\(\vecs a\) et\(\vecs b\).
Solution
Le produit croisé\(\vecs a×\vecs b\) est orthogonal aux deux vecteurs\(\vecs a\) et\(\vecs b\). On peut le calculer avec un déterminant :
\ [\ begin {align*} \ vecs a× \ vecs b &= \ begin {vmatrix} \ mathbf {\ hat i} & \ mathbf {\ hat j} & \ mathbf {\ hat k} \ \ 5 et 2 & −1 \ \ 0 et −1 et −1 \ \ 0 et −1 \ \ 0 et −1 \ \ 0 et −1 \ \ 0 et −1 \ \ 0 et −1 \ \ 0 et −1 \ \ 0 et −1 \ \ 0 et −1 \ \ 0 & −1 et −1 \ \ 0 et −1 \ \ 0 et −1 \ {vmatrix} \ mathbf {\ hat i} − \ begin {vmatrix} 5 et −1 \ \ 0 et 4 \ end {vmatrix} \ mathbf {\ hat j} + \ begin {vmatrix} 5 & 2 \ \ 0 et −1 \ end {vmatrix} \ mathbf {\ hat k} \ \ [4 points]
& =( 8−1) \ mathbf {\ hat i} − (20−0) \ mathbf {\ hat j} + (−5−0) \ mathbf {\ hat k} \ \ [4 points]
&=7 \ mathbf {\ hat i} −20 \ mathbf {\ hat j} −5 \ mathbf {\ hat k}. \ end {align*} \ nonumber \]
Normalisez ce vecteur pour trouver un vecteur unitaire dans la même direction :
\(\|\vecs a×\vecs b\|=\sqrt{(7)^2+(−20)^2+(−5)^2}=\sqrt{474}\).
Ainsi,\(\left\langle\dfrac{7}{\sqrt{474}},\dfrac{−20}{\sqrt{474}},\dfrac{−5}{\sqrt{474}}\right\rangle\) est un vecteur unitaire orthogonal à\(\vecs a\) et\(\vecs b\).
Simplifié, ce vecteur devient\(\left\langle\dfrac{7\sqrt{474}}{474},\dfrac{−10\sqrt{474}}{237},\dfrac{−5\sqrt{474}}{474}\right\rangle\).
Trouvez un vecteur unitaire orthogonal à la fois à\(\vecs a\) et\(\vecs b\), où\(\vecs a=⟨4,0,3⟩\) et\(\vecs b=⟨1,1,4⟩.\)
- Allusion
-
Normalisez le produit croisé.
- Réponse
-
\(\left\langle\dfrac{−3}{\sqrt{194}},\dfrac{−13}{\sqrt{194}},\dfrac{4}{\sqrt{194}}\right\rangle\)ou, simplifié comme\(\left\langle\dfrac{−3\sqrt{194}}{194},\dfrac{−13\sqrt{194}}{194},\dfrac{2\sqrt{194}}{97}\right\rangle\)
Pour utiliser le produit croisé pour calculer les surfaces, nous énonçons et prouvons le théorème suivant.
Si nous localisons des vecteurs\(\vecs u\) et\(\vecs v\) qu'ils forment les côtés adjacents d'un parallélogramme, alors l'aire du parallélogramme est donnée par\(‖\vecs u×\vecs v‖\) (Figure\(\PageIndex{5}\)).
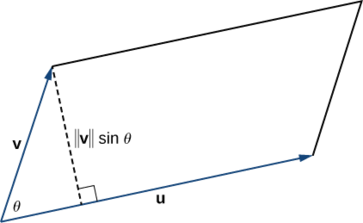
Nous montrons que l'amplitude du produit croisé est égale à la base multipliée par la hauteur du parallélogramme.
\[\begin{align*} \text{Area of a parallelogram} &= \text{base} × \text{height} \\[4pt] &=‖\vecs u‖(‖\vecs v‖\sin θ) \\[4pt] &=‖\vecs u×\vecs v‖ \end{align*}\]
□
\(R=(0,0,1)\)Soyons\(P=(1,0,0),Q=(0,1,0),\) les sommets d'un triangle (Figure\(\PageIndex{6}\)). Trouvez sa région.
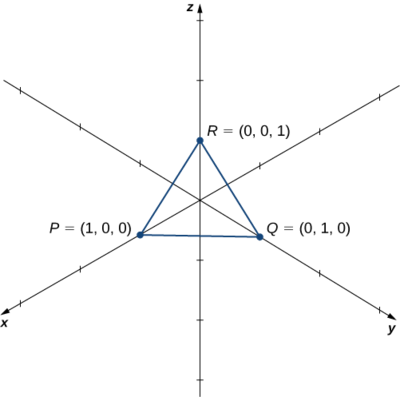
Solution
Nous avons\(\vecd{PQ}=⟨0−1,1−0,0−0⟩=⟨−1,1,0⟩\) et\(\vecd{PR}=⟨0−1,0−0,1−0⟩=⟨−1,0,1⟩\). L'aire du parallélogramme avec\(\vecd{PQ}\) les côtés adjacents\(\vecd{PR}\) est donnée par\(∥\vecd{PQ}×\vecd{PR}∥\) :
\ [\ begin {align*} \ vecd {PQ} \ times \ vecd {PR} &= \ begin {vmatrix} \ mathbf {\ hat i} & \ mathbf {\ hat j} & \ mathbf {\ hat k} \ \ −1 et 0 \ \ −1 et 0 \ \ −1 et 0 et 1 \ end {vmatrix} \ \ [4 points]
&= (1−0) \ mathbf {\ hat i} − (−1−0) \ mathbf {\ hat j} + (0− (−1)) \ mathbf {\ hat k} \ \ [4 points]
&= \ mathbf {\ hat i} + \ mathbf {\ hat j} + \ mathbf {\ hat k} \ \ [10 points]
\ vecd {PQ} × \ vecd {PR} &=kcal 1,1,1\ \ [4 points]
&= \ sqrt {1^2+1^2+1^2} \ \ [4 points]
&= \ sqrt {3}. \ end {align*} \ nonumber \]
La surface de\(ΔPQR\) est égale à la moitié de la surface du parallélogramme ou\(\sqrt{3}/2 \, \text{units}^2\).
Trouvez l'aire du parallélogramme\( PQRS\) avec les sommets\( P(1,1,0)\)\(Q(7,1,0)\),\(R(9,4,2)\), et\( S(3,4,2)\).
- Allusion
-
Esquissez le parallélogramme et identifiez deux vecteurs qui forment les côtés adjacents du parallélogramme.
- Réponse
-
\(6\sqrt{13}\, \text{units}^2\)
Le produit Triple Scalar
Comme le produit croisé de deux vecteurs est un vecteur, il est possible de combiner le produit scalaire et le produit croisé. Le produit scalaire d'un vecteur avec le produit croisé de deux autres vecteurs est appelé produit scalaire triple car le résultat est un scalaire.
Le produit scalaire triple des vecteurs\( \vecs u\),\( \vecs v,\) et\(\vecs w\) est
\[ \vecs u⋅( \vecs v× \vecs w). \nonumber \]
Le produit scalaire triple des vecteurs
\[ \vecs u=u_1 \mathbf{\hat i}+u_2 \mathbf{\hat j}+u_3\mathbf{\hat k} \nonumber \]
\[ \vecs v=v_1\mathbf{\hat i}+v_2\mathbf{\hat j}+v_3\mathbf{\hat k} \nonumber \]
et
\[ \vecs w=w_1 \mathbf{\hat i}+w_2\mathbf{\hat j}+w_3\mathbf{\hat k} \nonumber \]
est le déterminant de la\(3×3\) matrice formée par les composantes des vecteurs :
\[ \vecs u⋅( \vecs v× \vecs w)=\begin{vmatrix}u_1 & u_2 & u_3\\v_1 & v_2 & v_3\\w_1 & w_2 & w_3\end{vmatrix}. \label{triple2} \]
Le calcul est simple.
\ [\ begin {align*} \ vecs u⋅ (\ vecs v× \ vecs w) &=rq_u_1, u_2, u_3·⋅⌘v_2w_3−v_3w_2, −v_1w_3+v_3w_1, v_1w_2−v_2w_1⟩ \ \ [4pt] &=u_1 (v_2w_1−v_2w_1⟩ \ \ [4pt] &=u_1 (v_2w_1) _3−v_3w_2) +u_2 (−v_1w_3+v_3w_1) +u_3 (v_1w_2−v_2w_1) \ \ [4 points]
&=u_1 (v_2w_3−v_3w_2) −u_2 (v_1w_3−v_3w_1) +u_3 (v_1w_3w_1) +u_3 (v_1w_3−v_3w_1) _2−v_2w_1) \ \ [4 points]
&= \ begin {vmatrix} u_ 1 & u_2 et u_3 \ \ v_1 et v_2 et v_3 \ \ w_1 et w_2 et w_3 \ end {vmatrix}. \ end {align*} \ nonumber \]
□
Laissez\(\vecs u=⟨1,3,5⟩,\,\vecs v=⟨2,−1,0⟩\) et\(\vecs w=⟨−3,0,−1⟩\). Calculez le produit scalaire triple\(\vecs u⋅(\vecs v×\vecs w).\)
Solution
Appliquez directement l'équation \ ref {triple2} :
\ [\ begin {align*} \ vecs u⋅ (\ vecs v× \ vecs w) &= \ begin {vmatrix} 1 et 3 et 5 \ \ 2 et −1 et 0 \ \ −3 & 0 et −1 \ end {vmatrix} \ \ [4pt]
&=1 \ begin {vmatrix} −1 et 0 \ \ 0 et −1 \ end {vmatrix} −3 \ begin {vmatrix} 2 et 0 \ \ −3 et −1 \ end {vmatrix} +5 \ begin {vmatrix} 2 et −1 \ \ −3 et 0 \ end { vmatrix} \ \ [4 points]
& =( 1−0) −3 (−2−0) +5 (0−3) \ \ [4 points]
&=1+6−15=−8. \ end {align*} \ nonumber \]
Calculez le produit scalaire triple\(\vecs a⋅(\vecs b×\vecs c),\) où\(\vecs a=⟨2,−4,1⟩, \vecs b=⟨0,3,−1⟩\), et\(\vecs c=⟨5,−3,3⟩.\)
- Allusion
-
Placez les vecteurs sous forme de lignes d'une\(3×3\) matrice, puis calculez le déterminant.
- Réponse
-
\(17\)
Lorsque nous créons une matrice à partir de trois vecteurs, nous devons faire attention à l'ordre dans lequel nous listons les vecteurs. Si nous les listons dans une matrice dans un ordre puis que nous réorganisons les lignes, la valeur absolue du déterminant reste inchangée. Cependant, chaque fois que deux lignes changent de place, le déterminant change de signe :
\(\begin{vmatrix}a_1 & a_2 & a_3\\b_1 & b_2 & b_3\\c_1 & c_2 & c_3\end{vmatrix}=d \quad\quad \begin{vmatrix}b_1 & b_2 & b_3\\a_1 & a_2 & a_3\\c_1 & c_2 & c_3\end{vmatrix}=−d \quad\quad \begin{vmatrix}b_1 & b_2 & b_3\\c_1 & c_2 & c_3\\a_1 & a_2 & a_3\end{vmatrix}=d \quad\quad \begin{vmatrix}c_1 & c_2 & c_3\\b_1 & b_2 & b_3\\a_1 & a_2 & a_3\end{vmatrix}=−d\)
Vérifier ce fait est simple, mais plutôt compliqué. Jetons un coup d'œil à cela avec un exemple :
\ [\ begin {align*} \ begin {vmatrix} 1 et 2 et 1 \ \ −2 & 0 et 3 \ \ 4 et 1 et −1 \ end {vmatrix} &= \ begin {vmatrix} 0 et 3 \ \ 1 et −1 \ end {vmatrix} −2 \ begin {vmatrix} −2 et 3 \ \ 4 et −1 \ end {vmatrix} + \ begin {vmatrix} −2 et 0 \ \ 4 et 1 \ end {vmatrix} \ \ [4 points]
& =( 0−3) −2 (2−12) + (−2−0) \ \ [4 points]
&=−3+20−2=15. \ end {align*} \ nonumber \]
En changeant les deux premières rangées, nous avons
\ [\ begin {align*} \ begin {vmatrix} −2 et 0 et 3 \ \ 1 et 2 et 1 \ \ 4 et 1 \ end {vmatrix} &=-2 \ begin {vmatrix} 2 et 1 \ \ 1 et −1 \ end {vmatrix} +3 \ begin {vmatrix} 1 et 2 \ \ 4 et 1 \ end {vmatrix} \ \ [4pt]
&=−2 (−2−1) +3 (1−8) \ \ [4 points]
&=6−21 = −15. \ end {align*} \ nonumber \]
Réarranger les vecteurs dans les produits triples revient à réorganiser les lignes de la matrice du déterminant. Laissez\(\vecs u=u_1\mathbf{\hat i}+u_2\mathbf{\hat j}+u_3\mathbf{\hat k}, \vecs v=v_1\mathbf{\hat i}+v_2\mathbf{\hat j}+v_3\mathbf{\hat k},\) et\(\vecs w=w_1\mathbf{\hat i}+w_2\mathbf{\hat j}+w_3\mathbf{\hat k}.\) appliquez la note, nous avons
\[\vecs u⋅(\vecs v×\vecs w)=\begin{vmatrix}u_1 & u_2 & u_3\\v_1 & v_2 & v_3\\w_1 & w_2 & w_3\end{vmatrix} \nonumber \]
et
\[\vecs u⋅(\vecs w×\vecs v)=\begin{vmatrix}u_1 & u_2 & u_3\\w_1 & w_2 & w_3\\v_1 & v_2 & v_3\end{vmatrix}. \nonumber \]
Nous pouvons obtenir le déterminant du calcul\(\vecs u⋅(\vecs w×\vecs v)\) en commutant les deux dernières lignes de\(\vecs u⋅(\vecs v×\vecs w).\) Par conséquent,\(\vecs u⋅(\vecs v×\vecs w)=−\vecs u⋅(\vecs w×\vecs v).\)
En suivant ce raisonnement et en explorant les différentes manières d'échanger des variables dans le produit triple scalaire, nous avons obtenu les identités suivantes :
\ [\ begin {align} \ vecs u⋅ (\ vecs v× \ vecs w) &=− \ vecs u⋅ (\ vecs w× \ vecs v) \ \ [10pt]
\ vecs u⋅ (\ vecs v× \ vecs w) &= \ vecs v⋅ (\ vecs w× \ vecs u) = \ vecs w⋅ (\ vecs u×) vecs (v). \ end {align} \ nonnumber \]
\(\vecs v\)Soit\(\vecs u\) deux vecteurs en position standard. Si\(\vecs u\) et ne\(\vecs v\) sont pas des multiples scalaires les uns des autres, alors ces vecteurs forment les côtés adjacents d'un parallélogramme. Nous avons vu dans Note que l'aire de ce parallélogramme est\(‖\vecs u×\vecs v‖\). Supposons maintenant que nous ajoutions un troisième vecteur\(\vecs w\) qui ne se trouve pas dans le même plan que\(\vecs u\) et\(\vecs v\) partage toujours le même point initial. Ces vecteurs forment ensuite trois arêtes d'un parallélépipède, un prisme tridimensionnel à six faces qui sont chacune des parallélogrammes, comme le montre la figure\(\PageIndex{7}\). Le volume de ce prisme est le produit de la hauteur de la figure et de la surface de sa base. Le produit scalaire triple de\(\vecs u,\vecs v,\) et\(\vecs w\) fournit une méthode simple pour calculer le volume du parallélépipède défini par ces vecteurs.
Le volume d'un parallélépipède avec des arêtes adjacentes donné par les vecteurs\(\vecs u,\vecs v\), et\(\vecs w\) est la valeur absolue du produit scalaire triple (Figure\(\PageIndex{7}\)) :
\[V=||\vecs u⋅(\vecs v×\vecs w)||. \nonumber \]
Notez que, comme son nom l'indique, le produit triple scalaire produit un scalaire. La formule de volume qui vient d'être présentée utilise la valeur absolue d'une quantité scalaire.
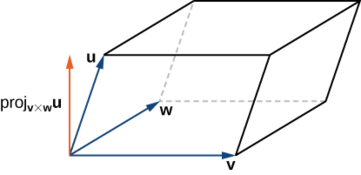
La surface de la base du parallélépipède est donnée par\(‖\vecs v×\vecs w‖.\) La hauteur de la figure est donnée par\(\|\text{proj}_{\vecs v×\vecs w}\vecs u\|.\) Le volume du parallélépipède est le produit de la hauteur et de la surface de la base, nous avons donc
\ [\ begin {align*} V &=\ text {proj} _ {\ vecs v× \ vecs w} \ vecs un1 \ vecs v× \ vecs w× \ vecs wlang=fr \ \ [4pt]
&=\ drac {\ vecs u⋅ (\ vecs v× \ vecs u⋅ (\ vecs v× \ vecs w⋅ (\ vecs v× \ vecs u⋅ (\ vecs v× \ vecs u⋅ (\ vecs v× \ vecs u⋅ (\ vecs v× \ vecs u⋅ (\ vecs v× vecs v× \ vecs w1050 \ \ [4 points]
&= \ | \ vecs u⋅ (\ vecs v× \ vecs w) \ |. \ end {align*} \]
□
Laissez\(\vecs u=⟨−1,−2,1⟩,\vecs v=⟨4,3,2⟩,\) et\(\vecs w=⟨0,−5,−2⟩\). Déterminez le volume du parallélépipède avec des arêtes adjacentes\(\vecs u,\vecs v\), et\(\vecs w\) (Figure\(\PageIndex{8}\)).
Solution
Nous avons
\ [\ begin {align*} \ vecs u⋅ (\ vecs v× \ vecs w) &= \ begin {vmatrix} −1 et −2 et 1 \ \ 4 et 3 et 2 \ \ 0 et −5 et −2 \ end {vmatrix} \ \ [4pt]
&= (−1) \ begin {vmatrix} 3 et 2 \ \ −5 et −2 \ end {vmatrix} +2 \ begin {vmatrix} 4 et 2 \ \ 0 et −2 \ end {vmatrix} + \ begin {vmatrix} 4 et 3 \ \ 0 et −5 \ end { vmatrix} \ \ [4 points]
& =( −1) (−6+10) +2 (−8−0) + (−20−0) \ \ [4 points]
&=−4−16−20 \ \ [4 points]
&=−40. \ end {align*} \]
Ainsi, le volume du parallélépipède est égal aux\(|−40|=40\) unités 3
Trouvez le volume du parallélépipède formé par les vecteurs\(\vecs a=3\mathbf{\hat i}+4\mathbf{\hat j}−\mathbf{\hat k}, \vecs b=2\mathbf{\hat i}−\mathbf{\hat j}−\mathbf{\hat k},\) et\(\vecs c=3\mathbf{\hat j}+\mathbf{\hat k}.\)
- Allusion
-
Calculez le produit scalaire triple en trouvant un déterminant.
- Réponse
-
\(8\)unités 3
Applications du produit croisé
Le produit croisé apparaît dans de nombreuses applications pratiques en mathématiques, en physique et en ingénierie. Examinons ici certaines de ces applications, y compris la notion de couple, avec laquelle nous avons commencé cette section. D'autres applications apparaîtront dans les chapitres suivants, en particulier dans notre étude des champs vectoriels tels que les champs gravitationnels et électromagnétiques (Introduction au calcul vectoriel).
Utilisez le produit scalaire triple pour montrer que les vecteurs\(\vecs u=⟨2,0,5⟩,\vecs v=⟨2,2,4⟩\) et\(\vecs w=⟨1,−1,3⟩\) sont coplanaires, c'est-à-dire que ces vecteurs se situent dans le même plan.
Solution
Commencez par calculer le produit scalaire triple pour trouver le volume du parallélépipède défini par\(\vecs u,\vecs v,\) et\(\vecs w\) :
\ [\ begin {align*} \ vecs u⋅ (\ vecs v× \ vecs w) &= \ begin {vmatrix} 2 et 0 et 5 \ \ 2 et 4 \ \ 1 et −1 et −1 et 3 \ end {vmatrix} \ \ [4 points]
&= [2) (3) + (0) (4) (1) (1) +5 (2) (−1)] − 5 (2) (1) + (2) (2) (4) (-1) + (0) (2) (3)] \ \ [4 points]
&=2−2 =0. \ end {align*} \]
Le volume du parallélépipède est\(0\) d'unités 3, donc l'une des dimensions doit être nulle. Les trois vecteurs se situent donc tous dans le même plan.
Les vecteurs\(\vecs a=\mathbf{\hat i}+\mathbf{\hat j}−\mathbf{\hat k}, \vecs b=\mathbf{\hat i}−\mathbf{\hat j}+\mathbf{\hat k},\) sont-ils\(\vecs c=\mathbf{\hat i}+\mathbf{\hat j}+\mathbf{\hat k}\) coplanaires ?
- Allusion
-
Calculez le produit scalaire triple.
- Réponse
-
Non, le produit scalaire triple est\(−4≠0,\) tel que les trois vecteurs forment les arêtes adjacentes d'un parallélépipède. Ils ne sont pas coplanaires.
Un seul plan peut passer par un ensemble de trois points non colinéaires. Trouvez un vecteur orthogonal au plan contenant des points\(P=(9,−3,−2),Q=(1,3,0),\) et\(R=(−2,5,0).\)
Solution
Le plan doit contenir des vecteurs\(\vecd{PQ}\) et\(\vecd{QR}\) :
\(\vecd{PQ}=⟨1−9,3−(−3),0−(−2)⟩=⟨−8,6,2⟩\)
\(\vecd{QR}=⟨−2−1,5−3,0−0⟩=⟨−3,2,0⟩.\)
Le produit croisé\(\vecd{PQ}×\vecd{QR}\) produit un vecteur orthogonal à la fois à\(\vecd{PQ}\) et\(\vecd{QR}\). Par conséquent, le produit croisé est orthogonal au plan qui contient ces deux vecteurs :
\ [\ begin {align*} \ vecd {PQ} × \ vecd {QR} &= \ begin {vmatrix} \ mathbf {\ hat i} & \ mathbf {\ hat j} & \ mathbf {\ hat k} \ \ −8 et 6 et 2 \ \ −3 et 2 et 0 \ end {vmatrix} \ \ [4pt]
&=0 \ mathbf {\ hat i} −6 \ mathbf {\ hat j} −16 \ mathbf {\ hat k} − (−18 \ mathbf {\ hat k} +4 \ mathbf {\ hat i} +0 \ mathbf {\ hat j}) \ \ [4 points]
&=−4 \ mathbf {\ hat i} −6 \ mathbf {\ hat j} +2 \ mathbf {\ hat k}. \ end {align*} \]
Nous avons vu comment utiliser le produit scalaire triple et comment trouver un vecteur orthogonal à un plan. Nous appliquons maintenant le produit croisé à des situations réelles.
Parfois, une force provoque la rotation d'un objet. Par exemple, tourner un tournevis ou une clé crée ce type d'effet de rotation, appelé couple.
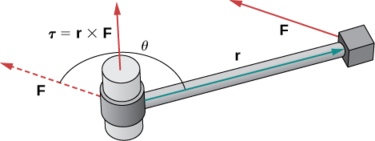
Le couple\(\vecs \tau\) (la lettre grecque tau) mesure la tendance d'une force à produire une rotation autour d'un axe de rotation. \(\vecs r\)Soit un vecteur dont le point initial est situé sur l'axe de rotation et dont le point terminal est situé au point où la force est appliquée, et que le vecteur\(\vecs F\) représente la force. Le couple est alors égal au produit croisé de\(r\) et\(F\) :
\[\vecs \tau=\vecs r×\vecs F. \nonumber \]
Voir la figure\(\PageIndex{9}\).
Pensez à utiliser une clé pour serrer un boulon. Le couple τ appliqué au boulon dépend de la force avec laquelle nous poussons la clé (force) et de la distance à laquelle nous appliquons la force sur le manche. Le couple augmente avec l'augmentation de la force exercée sur la clé à une plus grande distance du boulon. Les unités de couple les plus courantes sont le newton-mètre ou le pied-livre. Bien que le couple soit dimensionnellement équivalent au travail (il possède les mêmes unités), les deux concepts sont distincts. Le couple est utilisé spécifiquement dans le contexte de la rotation, alors que le travail implique généralement un mouvement le long d'une ligne.
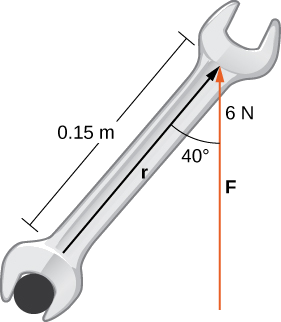
Un boulon est serré en appliquant une force de\(6\) N à une clé de 0,15 m (Figure\(\PageIndex{10}\)). L'angle entre la clé et le vecteur de force est de\(40°\). Déterminez l'amplitude du couple autour du centre du boulon. Arrondissez la réponse à deux décimales.
Solution :
Remplacez les informations données dans l'équation définissant le couple :
\ [\ begin {align*}, \ vecs τ&= \ | \ vecs r× \ vecs F \ | \ [4 points]
&=, \ vecs r\ vecs r\ vecs F\ sinθ \ \ [4 points]
& =( 0,15 \, \ text {m}) (6 \, \ text {N}) \ sin 40° \ [4 points]
& =0,58 \, \ text {n⋅m.} \ end {align*} \]
Calculez la force requise pour produire un couple\(15\) N⋅m à un angle égal à\(30º\) celui d'une tige de\(150\) -cm.
- Allusion
-
\(‖\vecs τ‖=15\)N⋅m et\(‖\vecs r‖=1.5\) m
- Réponse
-
\(20\)N
Concepts clés
- Le produit croisé\(\vecs u×\vecs v\) de deux vecteurs\(\vecs u=⟨u_1,u_2,u_3⟩\) et\(\vecs v=⟨v_1,v_2,v_3⟩\) est un vecteur orthogonal à la fois à\(\vecs u\) et\(\vecs v\). Sa longueur est donnée\(‖\vecs u×\vecs v‖=‖\vecs u‖⋅‖\vecs v‖⋅\sin θ,\) par\(θ\) l'angle entre\(\vecs u\) et\(\vecs v\). Sa direction est donnée par la règle de la main droite.
- La formule algébrique pour calculer le produit croisé de deux vecteurs,
\(\vecs u=⟨u_1,u_2,u_3⟩\)et\(\vecs v=⟨v_1,v_2,v_3⟩\), est
\(\vecs u×\vecs v=(u_2v_3−u_3v_2)\mathbf{\hat i}−(u_1v_3−u_3v_1)\mathbf{\hat j}+(u_1v_2−u_2v_1)\mathbf{\hat k}.\)
- Le produit croisé satisfait aux propriétés suivantes pour les vecteurs\(\vecs u,\vecs v,\) et\(\vecs w\), et scalaire\(c\) :
\(\vecs u×\vecs v=−(\vecs v×\vecs u)\)
\(\vecs u×(\vecs v+\vecs w)=\vecs u×\vecs v+\vecs u×\vecs w\)
\(c(\vecs u×\vecs v)=(c\vecs u)×\vecs v=\vecs u×(c\vecs v)\)
\(\vecs u×\vecs 0=\vecs 0×\vecs u=\vecs 0\)
\(\vecs v×\vecs v=\vecs 0\)
\(\vecs u⋅(\vecs v×\vecs w)=(\vecs u×\vecs v)⋅\vecs w\)
- Le produit croisé des vecteurs\(\vecs u=⟨u_1,u_2,u_3⟩\) et\(\vecs v=⟨v_1,v_2,v_3⟩\) est le déterminant\(\begin{vmatrix}\mathbf{\hat i} & \mathbf{\hat j} & \mathbf{\hat k}\\u_1 & u_2 & u_3\\v_1 & v_2 & v_3\end{vmatrix}\)
- Si les vecteurs\(\vecs u\) et\(\vecs v\) forment les côtés adjacents d'un parallélogramme, alors l'aire du parallélogramme est donnée par\(\|\vecs u×\vecs v\|.\)
- Le produit scalaire triple des vecteurs\(\vecs u, \vecs v,\) et\(\vecs w\) est\(\vecs u⋅(\vecs v×\vecs w).\)
- Le volume d'un parallélépipède avec des arêtes adjacentes donné par des vecteurs\(\vecs u,\vecs v\), et\(\vecs w\) est\(V=|\vecs u⋅(\vecs v×\vecs w)|.\)
- Si le produit scalaire triple des vecteurs A\(\vecs u,\vecs v,\) et\(\vecs w\) est nul, alors les vecteurs sont coplanaires. L'inverse est également vrai : si les vecteurs sont coplanaires, leur produit scalaire triple est nul.
- Le produit croisé peut être utilisé pour identifier un vecteur orthogonal à deux vecteurs donnés ou à un plan.
- Le couple\(\vecs τ\) mesure la tendance d'une force à produire une rotation autour d'un axe de rotation. Si la force\(\vecs F\) agit à une distance (déplacement)\(\vecs r\) de l'axe, le couple est égal au produit transversal de\(\vecs r\) et\(\vecs F: \vecs τ=\vecs r×\vecs F.\)
Équations clés
- Le produit croisé de deux vecteurs en termes de vecteurs unitaires
\[\vecs u×\vecs v=(u_2v_3−u_3v_2)\mathbf{\hat i}−(u_1v_3−u_3v_1)\mathbf{\hat j}+(u_1v_2−u_2v_1)\mathbf{\hat k} \nonumber \]
Lexique
produit croisé
\(\vecs u×\vecs v=(u_2v_3−u_3v_2)\mathbf{\hat i}−(u_1v_3−u_3v_1)\mathbf{\hat j}+(u_1v_2−u_2v_1)\mathbf{\hat k},\)où\(\vecs u=⟨u_1,u_2,u_3⟩\) et\(\vecs v=⟨v_1,v_2,v_3⟩\)
déterminant
un nombre réel associé à une matrice carrée
parallélépipède
un prisme tridimensionnel à six faces qui sont des parallélogrammes
couple
l'effet d'une force qui provoque la rotation d'un objet
produit triple scalaire
le produit scalaire d'un vecteur avec le produit croisé de deux autres vecteurs :\(\vecs u⋅(\vecs v×\vecs w)\)
produit vectoriel
le produit croisé de deux vecteurs