
9.3: Estabilidade
- Page ID
- 194923

objetivos de aprendizagem
Ao final desta seção, você poderá:
- Indique os tipos de equilíbrio.
- Descreva os equilíbrios estáveis e instáveis.
- Descreva o equilíbrio neutro.
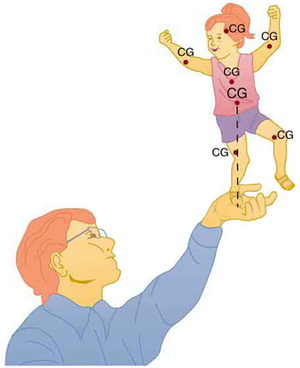
Uma coisa é ter um sistema em equilíbrio; outra é que ele seja estável. A boneca de brinquedo empoleirada na mão do homem na Figura\(\PageIndex{1}\), por exemplo, não está em equilíbrio estável. Existem três tipos de equilíbrio: estável, instável e neutro. As figuras deste módulo ilustram vários exemplos.
\(\PageIndex{1}\)A figura apresenta um sistema balanceado, como o boneco de brinquedo na mão do homem, que tem seu centro de gravidade (cg) diretamente sobre o pivô, de forma que o torque do peso total seja zero. Isso equivale a ter os torques das partes individuais equilibrados em torno do ponto de articulação, neste caso, a mão. Os cgs dos braços, pernas, cabeça e tronco são rotulados com tipos menores.
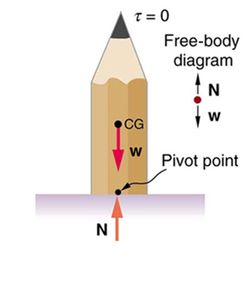
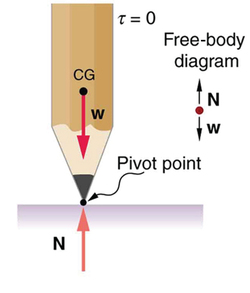
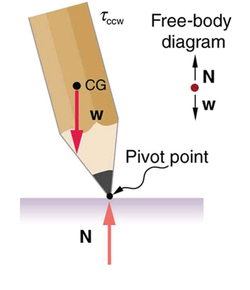
Diz-se que um sistema está em equilíbrio estável se, quando deslocado do equilíbrio, ele experimenta uma força ou torque líquido em uma direção oposta à direção do deslocamento. Por exemplo, uma bola de gude no fundo de uma tigela experimentará uma força restauradora quando deslocada de sua posição de equilíbrio. Essa força a move de volta para a posição de equilíbrio. A maioria dos sistemas está em equilíbrio estável, especialmente para pequenos deslocamentos. Para outro exemplo de equilíbrio estável, veja o lápis na Figura\(\PageIndex{2}\).
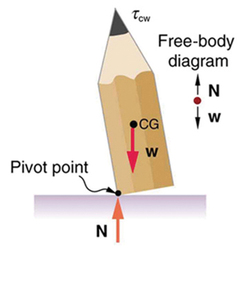
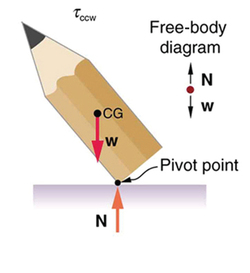
Um sistema está em equilíbrio instável se, quando deslocado, experimenta uma força ou torque líquido na mesma direção do deslocamento do equilíbrio. Um sistema em equilíbrio instável acelera para longe de sua posição de equilíbrio se deslocado, mesmo que ligeiramente. Um exemplo óbvio é uma bola apoiada no topo de uma colina. Uma vez deslocado, ele acelera para longe da crista. Veja as próximas figuras para exemplos de equilíbrio instável.
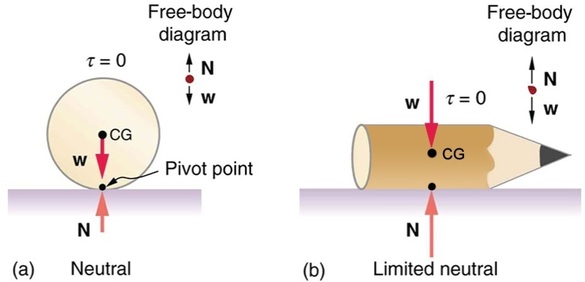
Um sistema está em equilíbrio neutro se seu equilíbrio for independente dos deslocamentos de sua posição original. Um mármore em uma superfície horizontal plana é um exemplo. Combinações dessas situações são possíveis. Por exemplo, uma bola de gude em uma sela é estável para deslocamentos em direção à frente ou atrás da sela e instável para deslocamentos para os lados. A figura\(\PageIndex{7}\) mostra outro exemplo de equilíbrio neutro.
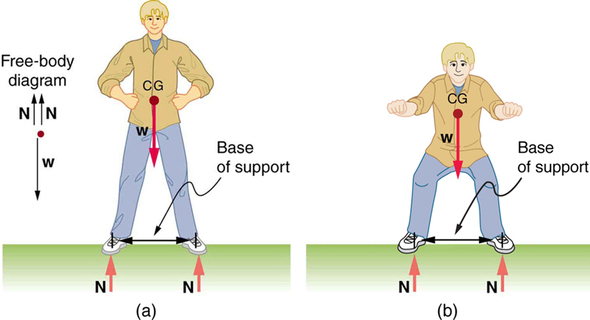
Quando consideramos até que ponto um sistema em equilíbrio estável pode ser deslocado antes de se tornar instável, descobrimos que alguns sistemas em equilíbrio estável são mais estáveis do que outros. O lápis na Figura\(\PageIndex{7}\) e a pessoa na Figura\(\PageIndex{8a}\) estão em equilíbrio estável, mas se tornam instáveis devido a deslocamentos relativamente pequenos para os lados. O ponto crítico é alcançado quando o cg não está mais acima da base de suporte. Além disso, como o cg do corpo de uma pessoa está acima dos pivôs dos quadris, os deslocamentos devem ser controlados rapidamente. Esse controle é uma função do sistema nervoso central que é desenvolvida quando aprendemos a manter nosso corpo ereto quando bebês. Para maior estabilidade em pé, os pés devem estar separados, proporcionando uma base de apoio maior. A estabilidade também é aumentada ao baixar o centro de gravidade ao dobrar os joelhos, como quando um jogador de futebol se prepara para receber uma bola ou se prepara para um tackle. Uma bengala, uma muleta ou um andador aumentam a estabilidade do usuário, ainda mais à medida que a base do suporte se alarga. Normalmente, o cg de uma mulher é mais baixo (mais próximo do solo) do que de um homem. As crianças pequenas têm o centro de gravidade entre os ombros, o que aumenta o desafio de aprender a andar.
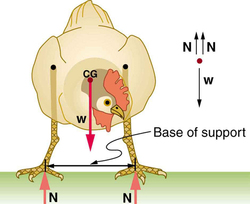
Animais como galinhas têm sistemas mais fáceis de controlar. A figura\(\PageIndex{9}\) mostra que o cg de uma galinha fica abaixo das articulações do quadril e entre seus pés largos e amplamente separados. Mesmo deslocamentos relativamente grandes do cg da galinha são estáveis e resultam na restauração de forças e torques que retornam o cg à sua posição de equilíbrio com pouco esforço por parte da galinha. Nem todos os pássaros são como galinhas, é claro. Alguns pássaros, como o flamingo, têm sistemas de equilíbrio quase tão sofisticados quanto os humanos.
A figura\(\PageIndex{9}\) mostra que o cg de uma galinha está abaixo das articulações do quadril e acima de uma ampla base de apoio formada por pés grandes e amplamente separados. Portanto, o frango está em equilíbrio muito estável, pois é necessário um deslocamento relativamente grande para torná-lo instável. O corpo da galinha é sustentado de cima pelos quadris e atua como um pêndulo entre os quadris. Portanto, o frango é estável para deslocamentos da frente para trás, bem como para deslocamentos de lado a lado.
Engenheiros e arquitetos se esforçam para alcançar equilíbrios extremamente estáveis para edifícios e outros sistemas que devem resistir ao vento, terremotos e outras forças que os afastem do equilíbrio. Embora os exemplos nesta seção enfatizem as forças gravitacionais, as condições básicas para o equilíbrio são as mesmas para todos os tipos de forças. A força externa líquida deve ser zero e o torque líquido também deve ser zero.
Experiência para levar para casa
- Fique em pé com os calcanhares, as costas e a cabeça contra a parede. Incline-se para frente a partir da cintura, mantendo os calcanhares e a parte inferior contra a parede, para tocar os dedos dos pés. Você pode fazer isso sem cair? Explique por que e o que você precisa fazer para poder tocar os dedos dos pés sem perder o equilíbrio. É mais fácil para uma mulher fazer isso?
Resumo
- Diz-se que um sistema está em equilíbrio estável se, quando deslocado do equilíbrio, ele experimenta uma força ou torque líquido em uma direção oposta à direção do deslocamento.
- Um sistema está em equilíbrio instável se, quando deslocado do equilíbrio, ele experimenta uma força ou torque líquido na mesma direção do deslocamento do equilíbrio.
- Um sistema está em equilíbrio neutro se seu equilíbrio for independente dos deslocamentos de sua posição original.
Glossário
- equilíbrio neutro
- um estado de equilíbrio que é independente dos deslocamentos de um sistema em relação à sua posição original
- equilíbrio estável
- um sistema, quando deslocado, experimenta uma força ou torque líquido em uma direção oposta à direção do deslocamento
- equilíbrio instável
- um sistema, quando deslocado, experimenta uma força ou torque líquido na mesma direção do deslocamento do equilíbrio