
36.2: Somatosensation
- Page ID
- 202612

培养技能
- 描述人体皮肤中的四种重要机械感受器
- 描述无毛皮肤和毛茸茸皮肤之间体感受体的地形分布
- 解释为什么对疼痛的感知是主观的
Somatosensation是一个混合感官类别,包括从皮肤和粘膜以及四肢和关节获得的所有感觉。 Somatosension 也被称为触觉,或者更熟悉地说是触觉。 Somatosensation 发生在整个身体外部,也发生在一些内部部位。 嵌入皮肤、粘膜、肌肉、关节、内脏器官和心血管系统中的各种受体类型起着作用。
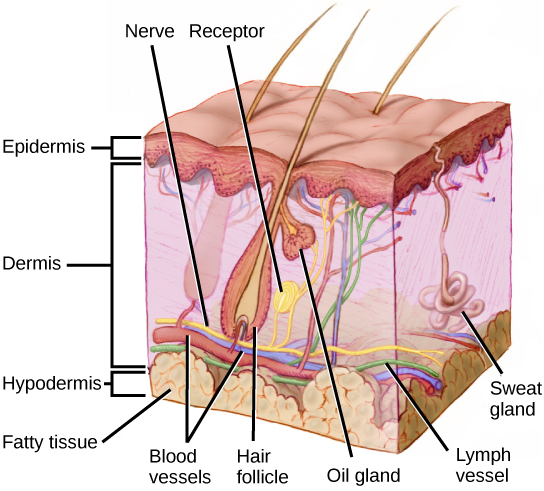
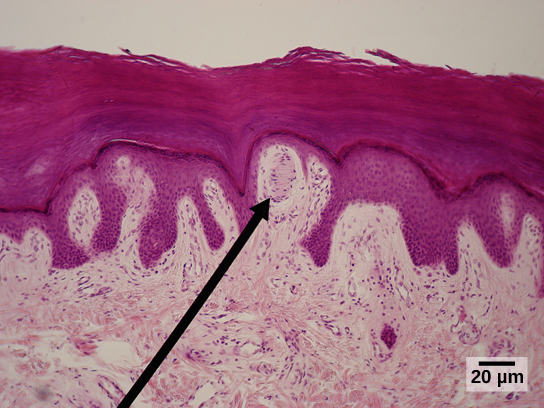
回想一下,表皮是哺乳动物皮肤的最外层。 它相对较薄,由充满角蛋白的细胞组成,没有血液供应。 表皮是阻挡水和病原体入侵的屏障。 在此之下,厚得多的真皮包含血管、汗腺、毛囊、淋巴管和分泌脂质的皮脂腺(图\(\PageIndex{1}\))。 表皮和真皮下方是皮下组织或皮下组织,即包含血管、结缔组织和感觉神经元轴突的脂肪层。 皮下层含有人体大约 50% 的脂肪,将真皮附着在骨骼和肌肉上,为真皮提供神经和血管。
体感受体
感觉受体分为五类:机械感受器、热感受器、本体感受器、疼痛受体和化学感受器。 这些类别基于每个受体类别转导的刺激的性质。 通常所说的 “触摸” 涉及不止一种刺激和一种以上的受体。 皮肤中的机械感受器被描述为封装(即被胶囊包围)或未封装(包括游离神经末梢的一组)。 顾名思义,自由神经末梢是感觉神经元的未封装树突体。 游离神经末梢是皮肤中最常见的神经末梢,它们延伸到表皮中间。 自由神经末梢对疼痛刺激、冷热和轻触敏感。 它们适应刺激的速度很慢,因此对刺激的突然变化不太敏感。
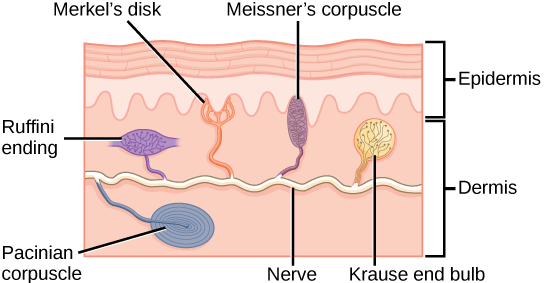
机械感受器分为三类:触觉、本体感受器和压力感受器。 机械感受器由于其质膜的物理变形而感知刺激。 它们包含机械门控离子通道,其栅极会根据压力、触觉、拉伸和声音而打开或关闭。” 人体皮肤中有四种主要的触觉机械感受器:默克尔的椎间盘、迈斯纳的小体、鲁菲尼末端和帕西尼亚小体;两个位于皮肤表面,两个位于更深处。 第五种机械感受器是克劳斯末端灯泡,只能在专门的区域找到。 默克尔的椎间盘(如图所示\(\PageIndex{2}\))存在于表皮底部附近的皮肤上层,包括有头发的皮肤和无毛的皮肤,即手掌和手指上的无毛皮肤、脚底、人类的嘴唇和其他人的嘴唇灵长类动物。 默克尔的圆盘密集地分布在指尖和嘴唇上。 它们是适应缓慢、未封装的神经末梢,它们对轻触有反应。 轻触,也称为判别性触摸,是一种可以精确定位刺激位置的光压。 默克尔磁盘的接受范围很小,有明确的边界。 这使得它们对边缘非常敏感,可以用于诸如在键盘上打字之类的任务。
练习
以下关于机械感受器的陈述中哪一项是错误的?
- Pacini 小体存在于无毛和毛茸茸的皮肤中。
- 默克尔的光盘在指尖和嘴唇上都很丰富。
- Ruffini 结尾是封装的机械感受器。
- 迈斯纳的小体延伸到下层真皮。
- 回答
-
D
迈斯纳的小体(如图所示\(\PageIndex{3}\))也被称为触觉小体,存在于上层真皮中,但它们会投射到表皮中。 它们也主要存在于指尖和眼皮的无毛皮肤中。 它们对细微的触感和压力有反应,但也会对低频振动或颤动做出反应。 它们适应迅速、充满液体、封装的神经元,具有小而定义明确的边界,并且对精细的细节反应灵敏。 就像默克尔的圆盘一样,迈斯纳的小体在手掌中不如指尖那么丰富。
表皮深处,靠近底部的是鲁菲尼末尾,也被称为球茎小体。 它们存在于无毛和毛茸茸的皮肤中。 它们是适应缓慢的封装机械感受器,可检测关节内的皮肤伸展和变形,因此它们为抓住物体和控制手指位置和运动提供了宝贵的反馈。 因此,它们还有助于本体感受和动觉。 Ruffini 结尾也可以检测到温暖。 请注意,这些温暖探测器比感冒探测器位于皮肤更深处。 因此,人类在发现温刺激之前就发现了感冒刺激也就不足为奇了。
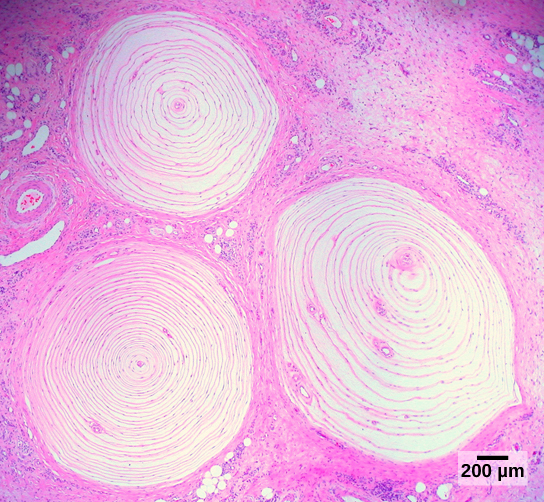
Pacinian 小体(见图\(\PageIndex{4}\))位于无毛皮肤和毛茸茸皮肤的真皮深处,在结构上与迈斯纳的小体相似;它们存在于骨膜、关节囊、胰腺和其他内脏、乳房和生殖器中。 它们正在快速调整机械感受器,可以感知深度瞬态(但不是长期的)压力和高频振动。 Pacinian 受体通过压缩来检测压力和振动,刺激其内部树突体。 皮肤中的帕西尼亚小体和鲁菲尼末梢比默克尔的椎间盘和迈斯纳的小体要少。
在本体感受中,本体感受和动觉信号通过从脊髓延伸到延髓的髓鞘传入神经元。 神经元在物理上没有联系,而是通过分泌成突触或沟通神经元之间的 “间隙” 的神经递质进行交流。 一旦进入延髓,神经元就会继续向丘脑传递信号。
肌肉主轴是伸展受体,用于检测肌肉的伸展量或延伸量。 与之相关的是高尔基肌腱器官,它们是检测肌肉收缩力的张力受体。 本体感受和动觉信号来自四肢。 潜意识的本体感受信号从脊髓流向小脑(协调肌肉收缩的大脑区域),而不是像大多数其他感官信息一样流向丘脑。
压力感受器检测器官的压力变化。 它们存在于颈动脉壁和主动脉壁中,用于监测血压,也存在于肺部,用于检测肺部扩张程度。 拉伸受体存在于消化系统和泌尿系统的各个部位。
除了这两种类型的深层受体外,还有快速适应的毛发受体,它们存在于包裹毛囊底部的神经末梢上。 有几种类型的头发受体可以检测缓慢和快速的头发运动,它们对运动的敏感性不同。 一些毛发感受器还可以检测皮肤偏转,而某些快速适应的毛发受体可以检测尚未触及皮肤的刺激。
整合来自机械感受器的信号
不同类型的受体在人体皮肤中协同作用的配置产生了非常精致的触感。 伤害感受体——检测疼痛的受体——位于地表附近。 经过精细校准的小型 MechanoReceptors(默克尔的圆盘和迈斯纳的小体)位于上层,即使是轻柔的触感,也可以精确定位。 大型 MechanoReceptors —— Pacinian corpuscles 和 Ruffini 末端 —— 位于下层,对更深的触摸有反应。 (考虑一下,到达那些更深受体的深层压力不需要精确定位。) 皮肤的上层和下层都能快速缓慢地保持适应受体。 原发体感皮层和次要皮质区域都负责处理机械感受器相互作用传递的复杂刺激画面。
机械感受器的密度
触觉受体在人体皮肤中的分布在全身不一致。 在人类中,触觉感受器在被任何类型的头发(例如手臂、腿部、躯干和脸部)覆盖的皮肤中的密度较低。 触摸感受器在无毛皮肤(例如人类指尖和嘴唇上发现的那种)中更密集,这种皮肤通常比毛茸茸的皮肤更敏感,更厚(4 到 5 mm 对 2 到 3 mm)。
人类受试者的受体密度是如何估算的? 人体不同部位压力受体的相对密度可以使用两点辨别测试通过实验来证明。 在本演示中,两个尖点(例如两个图钉)与受试者的皮肤接触(尽管硬度不足以引起疼痛或皮肤破裂)。 受试者报告他或她是否感觉到一分或两分。 如果将这两个点视为一个点,则可以推断出这两个点都在单个感官受体的接受区域中。 如果将两个点视为两个单独的点,则每个点都在两个独立的感官受体的接受区域中。 然后可以将这些点移近并重新测试,直到受试者报告说只感觉到一分,并且可以从该距离估算出单个受体的接受场的大小。
热接收
除了检测感冒的克劳斯末端球和检测温暖的鲁菲尼末梢外,一些游离神经末梢上还有不同类型的感冒受体:位于真皮、骨骼肌、肝脏和下丘脑中的热感受器,它们在不同的温度下被激活。 它们进入大脑的途径从脊髓穿过丘脑一直延伸到初级体感皮层。 来自脸部的温暖和寒冷信息通过其中一个颅神经传递到大脑。 你从经验中知道,可以容忍的冷刺激或热刺激很快就会发展为无法忍受的更为激烈的刺激。 任何过于激烈的刺激都可以被视为疼痛,因为温度感觉是沿着携带疼痛感的相同路径进行的
疼痛
疼痛是伤害感受的名称,伤害感受是对组织损伤作出反应的有害刺激的神经处理。 疼痛是由真正的伤害源引起的,例如接触导致热烧伤的热源或接触腐蚀性化学物质。 但是,疼痛也可能是由模仿有害刺激作用的无害刺激引起的,例如与辣椒素的接触,辣椒素是使辣椒味道变热的化合物,用于自卫胡椒喷雾剂和某些局部药物。 辣椒味道 “热” 是因为结合辣椒素的蛋白质受体会打开由温受体激活的相同钙通道。
伤害感受始于感官感受器,但疼痛,就伤害感知而言,要等到传递给大脑后才会开始。 有几种进入和穿过大脑的伤害感受途径。 大多数将伤害感受信息从脊髓带入大脑的轴突会投射到丘脑(其他感觉神经元也是如此),而神经信号在原发体感皮层中经过最终处理。 有趣的是,一种伤害感受途径不是投射到丘脑,而是直接投射到前脑中的下丘脑,后者调节自主神经系统的心血管和神经内分泌功能。 回想一下,威胁性或痛苦的刺激会刺激内脏感官系统的交感分支,为战斗或逃跑的反应做好准备。
链接到学习
观看这段视频,该视频以动画形式呈现伤害性疼痛的五个阶段。
摘要
Somatosension 包括从皮肤和粘膜以及四肢和关节获得的所有感觉。 Somatosensation发生在全身外部,也发生在一些内部部位,嵌入皮肤和粘膜中的各种受体类型起着作用。
有几种类型的特殊感官受体。 快速适应的自由神经末梢可检测伤害感受、冷热和轻触。 默克尔的圆盘缓慢适应,封装在指尖和嘴唇中,对轻触有反应。 迈斯纳的小体存在于无毛的皮肤中,具有快速适应的封装受体,可以检测触觉、低频振动和扑动。 Ruffini 末梢是缓慢适应的封装受体,可检测皮肤伸展、关节活动和温暖。 毛发感受器正在迅速调整包裹在毛囊底部的神经末梢,以检测头发运动和皮肤偏转。 最后,Pacinian 小体被封装,可以快速适应检测瞬态压力和高频振动的受体。
词汇表
- 自由神经末梢
- 缺少检测感官刺激的专门结构的传入神经元的终结;有些神经元对触觉、疼痛或温度有反应
- 无毛的
- 描述了人类和其他灵长类动物的手掌和手指、脚底和嘴唇上发现的非毛茸茸的皮肤
- 高尔基肌腱风琴
- 肌肉本体感受张力受体,提供高尔基肌腱反射的感官成分
- 迈斯纳的小体
- (也是触觉小体)在皮肤中封装、快速适应的机械感受器,对轻触做出反应
- 默克尔的光盘
- 皮肤中未封装、适应缓慢的机械感受器,对触摸有反应
- 肌肉主轴
- 本体感受拉伸受体,位于肌肉内,可将肌肉缩短到最佳长度以实现有效收缩
- 伤害感受
- 有害(例如破坏性)刺激的神经处理
- Pacinian corpuscle
- 封装在皮肤中的机械感受器,可对深层压力和振动做出反应
- Ruffini 结局
- (也是球茎小体)皮肤中缓慢适应的机械感受器,对皮肤伸展和关节位置有反应